
|
Ashok Kumar Pandey
Professor, Department of Mechanical Engineering, Indian Institute of Technology Hyderabad. |
About Students Vehicle Dynamics Lab SenAct Lab Publications Awards Photos & Links IITH ME

Course Work
ID1310: Engineering Statics (Aug-Nov2014, Jan-April'2012)
Particle, deformable and rigid bodies, statics, dynamics, fundamental laws of mechanics, parallelogram law and triangular law, vector operations; Resultant of coplanar and concurrent forces; Components of forces in space; Equilibrium of a particle and a rigid body. Trusses, Frames and Machines, analysis of forces in trusses using the method of joints and the method of sections; Special conditions in truss members: zero-force members; Condition of statically determinate system; Force analysis in frames and machines. Internal forces-normal or axial force, shear force, bending moment, torsional moment; Sign convention for different internal forces; Application of the method of sections to determine internal forces; Relationship between applied load, shear force, and bending moment; Method of superposition to obtain shear force diagram and bending moment diagram. Friction: Introduction to the concept of dry friction, Equilibrium of rigid bodies subjected to dry friction; Examples demonstrating the application of frictions on wedges, screws, belts, and bearings; Concept of rolling resistance. Principle of Virtual Work. Center of gravity and centroid; Moment of inertia; Theorems of Pappus and Guldinus; Moment of inertia for simple geometries; Parallel-axis theorem; Perpendicular-axis theorem; Polar moment of area; Radius of gyration; Application to Composite areas; Mass moment of inertia.
Lecture 1- Introduction and Course Content
Lecture 2- Engineering Statics: Introduction, Resultant of forces
Lecture 3- Resultant of forces -Problem
Lecture 4- Moments and Force Couple
Lecture 5- Support reactions and Equilibrium conditions
Lecture 6- Centroid of curve, area and volume
Lecture 7- Moment of inertia: thin wire, area and volume
Lecture 8- Moment of inertia: thin wire, area and volume ...
Lecture 9- Concept of Mohr's circle and product of area moment of inertia.
Lecture 10- Area Moment of Inertia about arbitrary axis-derivation.
Lecture 11- Mass Moment of Inertia about a given and an arbitrary axes.
Lecture 12-Theorems of Pappus (revisited) and the moments of inertia,
Lecture 13- Fundamentals about trusses.
Lecture 14- Simple Truss, Proper Constraint Conds., Zero Force Member.
Lecture 15- Force Analysis of Trusses.
Lecture 16- Frames and Machines
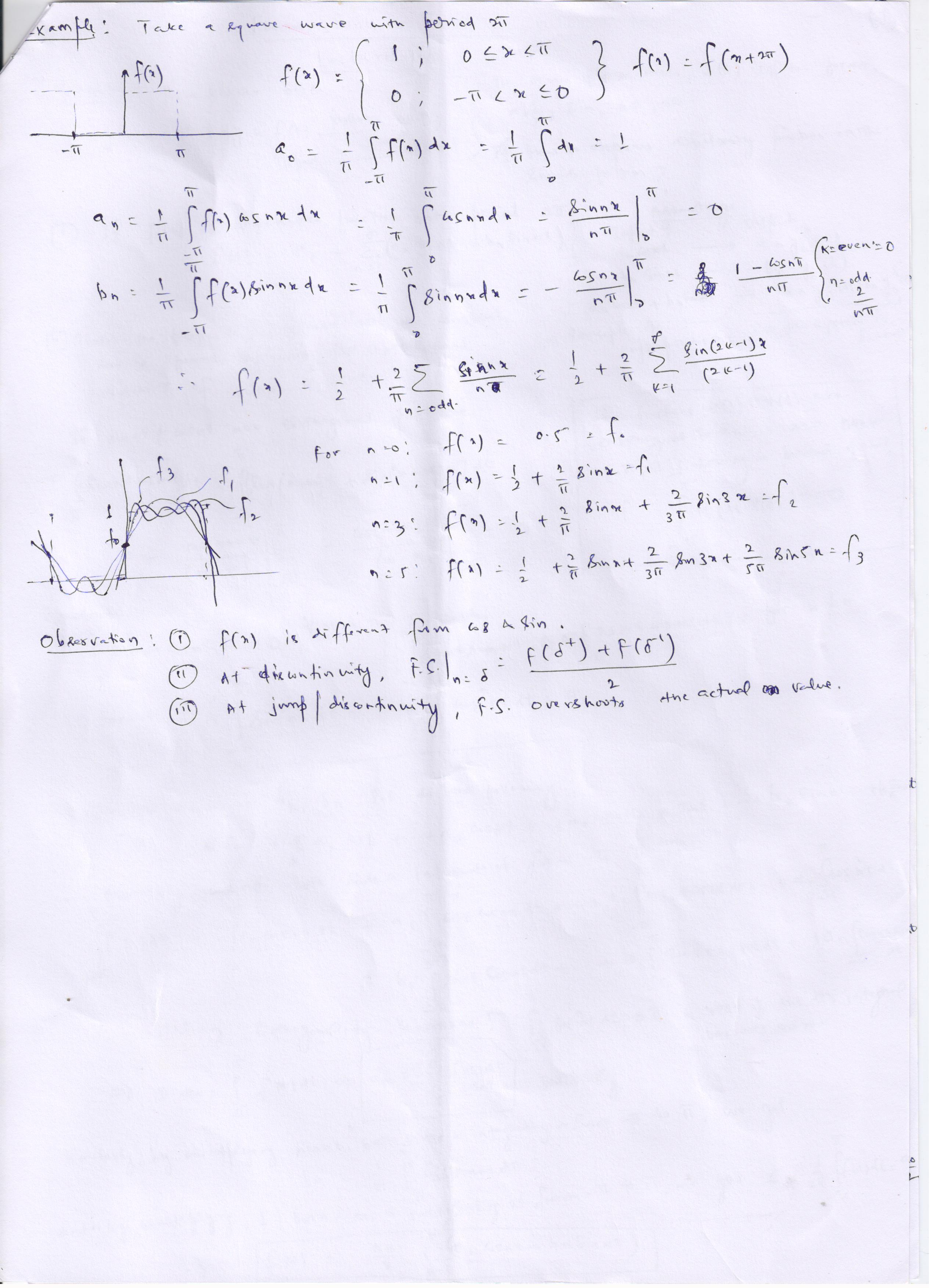
Lecture 17- Shear Force and Bending Moment.
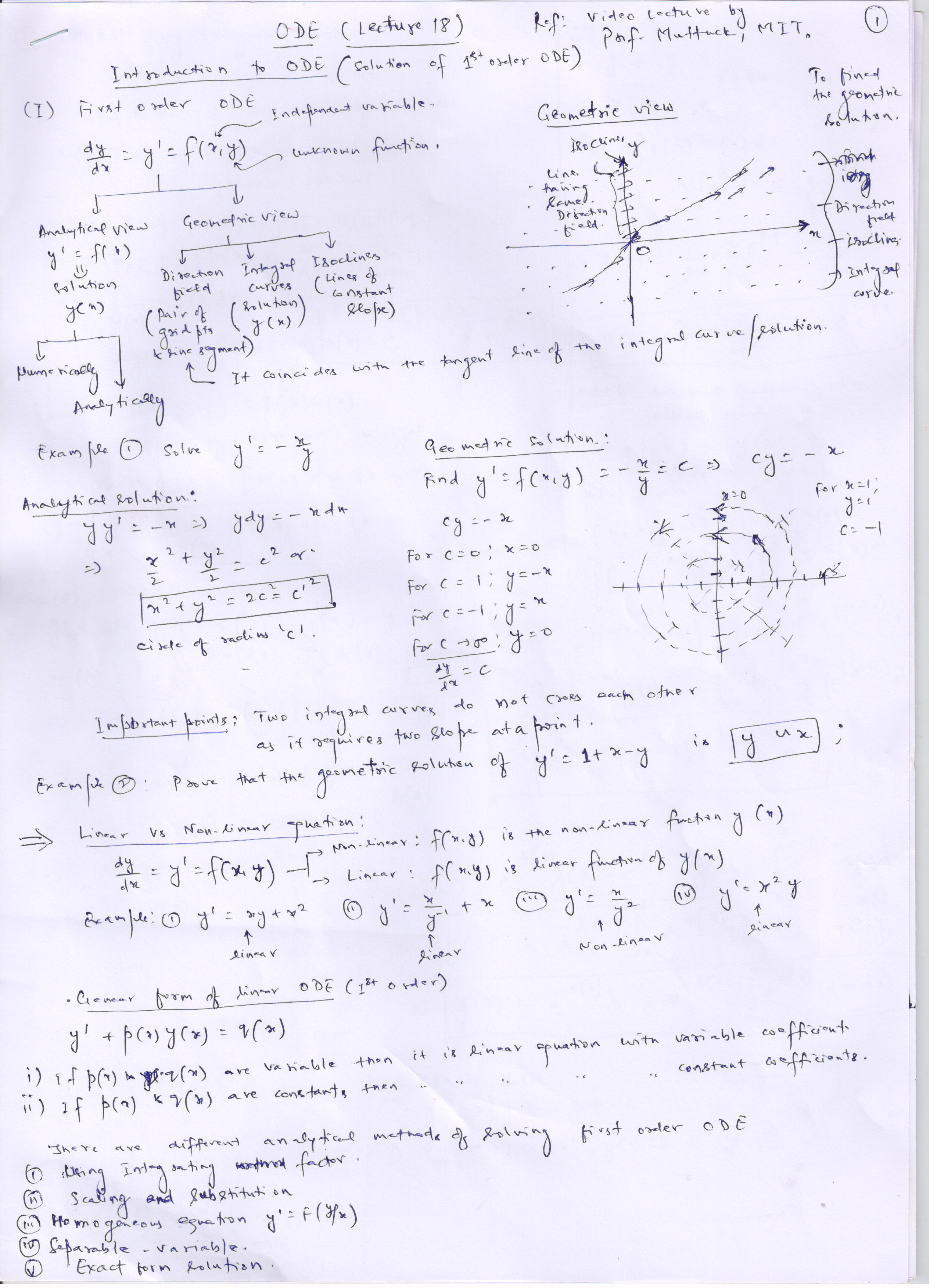
Lecture 18- Cable under concentrated loading .
Lecture 19- Cable under uniformly varying load.
Lecture 20- Shape and tension of cable under varying load.
Lecture 21- Concepts of friction.
Lecture 22- Friction Application: Power Screw, End and Collar Bearing, etc.
Lecture 23- Friction Application: Journal Bearing and Rolling Friction.
Lecture 24- Friction Application: Belt and Pulley.
Lecture 25- Virtual Work Principle.
Full Video Lectures of Engineering Statics by Ashok Kumar Pandey
Course Feedback 2014 on Flip Teaching (1-Disagree; 2- Weakly agree; 3-Agree; 4-Strongly agree)
ME5010:Mathematical Methods for Engineers (Aug-Nov 2012, 2013, 2014)
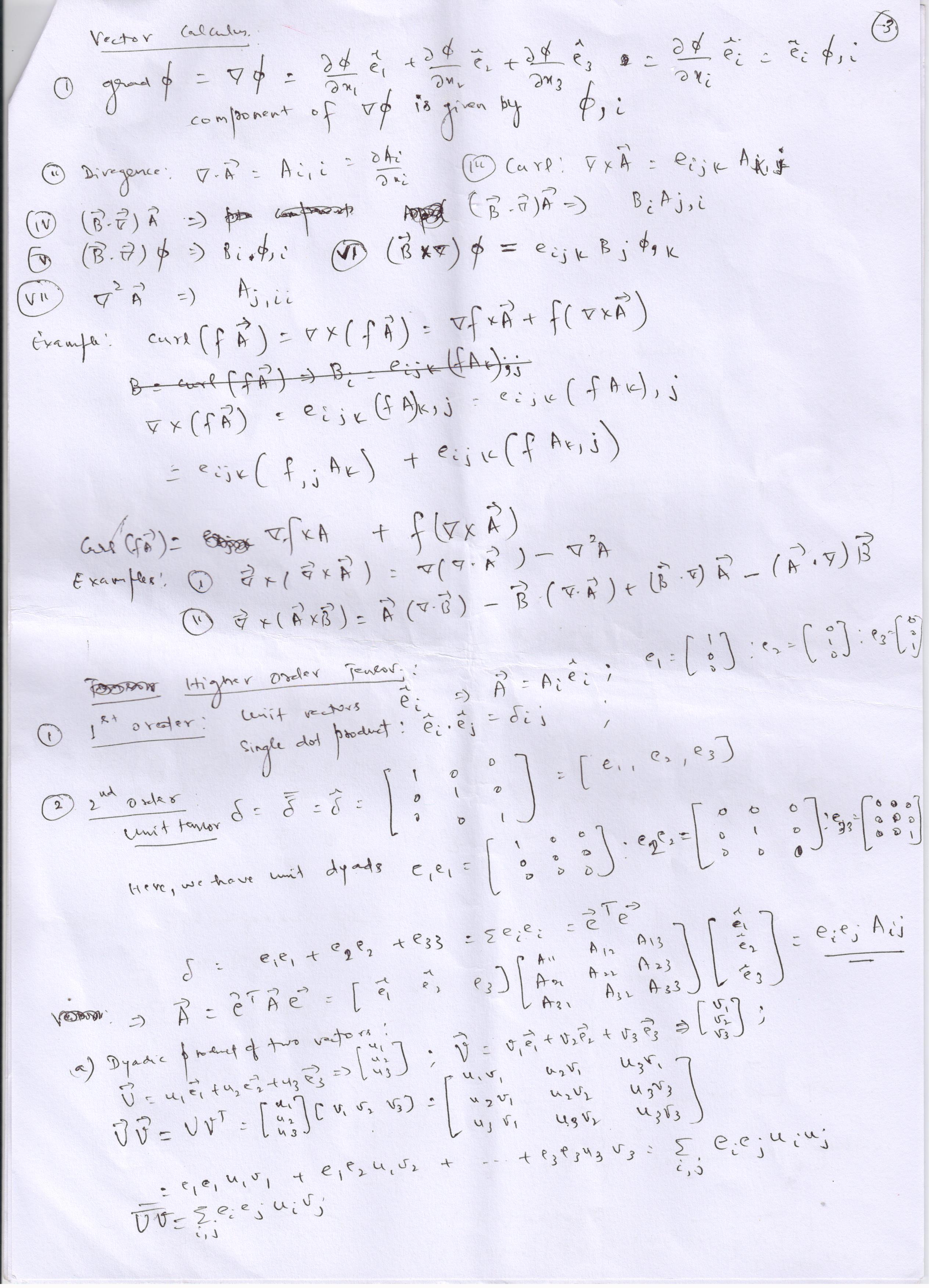
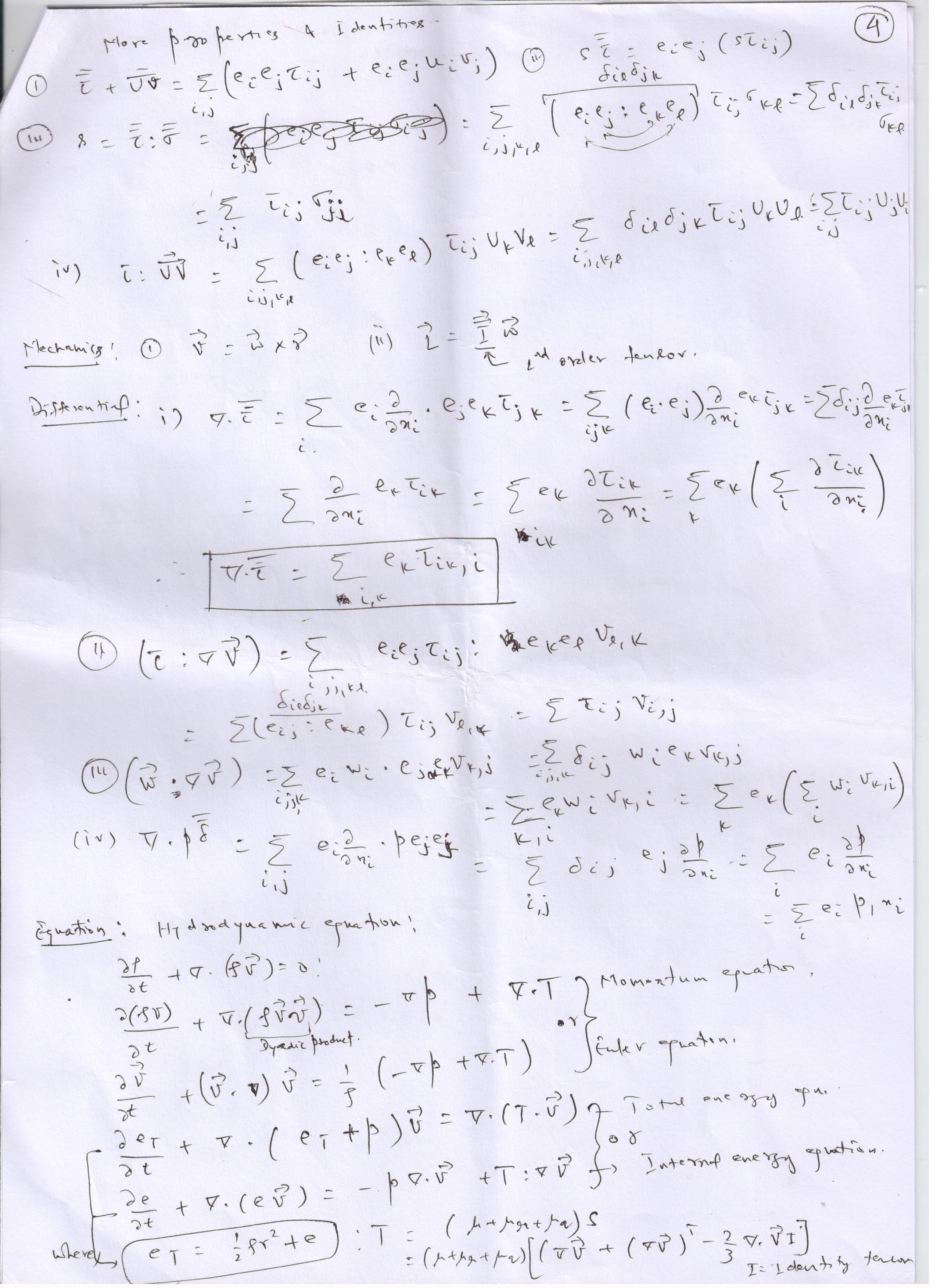
Vectors, operations and operators, identities; Cartesian tensors: definition, notation, transformation matrix, orthogonal properties, order of a tensor, operations, contraction, quotient rule, vector identities and theorems in tensor form. Function, functional and an introduction to integral of calculus, Euler-Lagrange equation. Introduction to Integral equations, classifications, solution methodology. Laplace transforms, translation formula, jump discontinuity, application to the solution of differential equation and integral equation. Fourier transfer, Fourier series, Parsevals theorem. First and second order ODEs with constant coefficients, Numerical solution: Euler and Runge Kutte method, stability and convergence criteria of the numerical solution, Initial value problem and boundary value problem for homogenous as well as nonhomogenous equations: Integrating factor based method, variation of parameter, shooting method, etc., Sturm-Liouville problem, Eigen function and Green’s function. PDEs: Classification of pdes, Canonical forms of pdes, analytical solution: separable variable, Fourier series and transform based solution. Linear algebraic equations: matrix form, matrix operations, determinants, Cramer’s rule, Inverse, singularity, inconsistent equations, Gauss elimination, Gauss-Seidel, LU decomposition, finding inverses, eigen-values and eigenvectors, orthogonalization, Gram-Schmidt procedure, singular value decomposition (without proof) .
Notice: The lecture notes are prepared by referring many books and lectures of many other authors whose lectures are available online. I would like to acknowledge the contribution of those teachers in helping me to under stand the subject better. If any of the authors have objection to any content that is mentioned in the notes, please contact me for the same by sending an email to me at ashok@iith.ac.in.
0. Course content and references Lecture 0
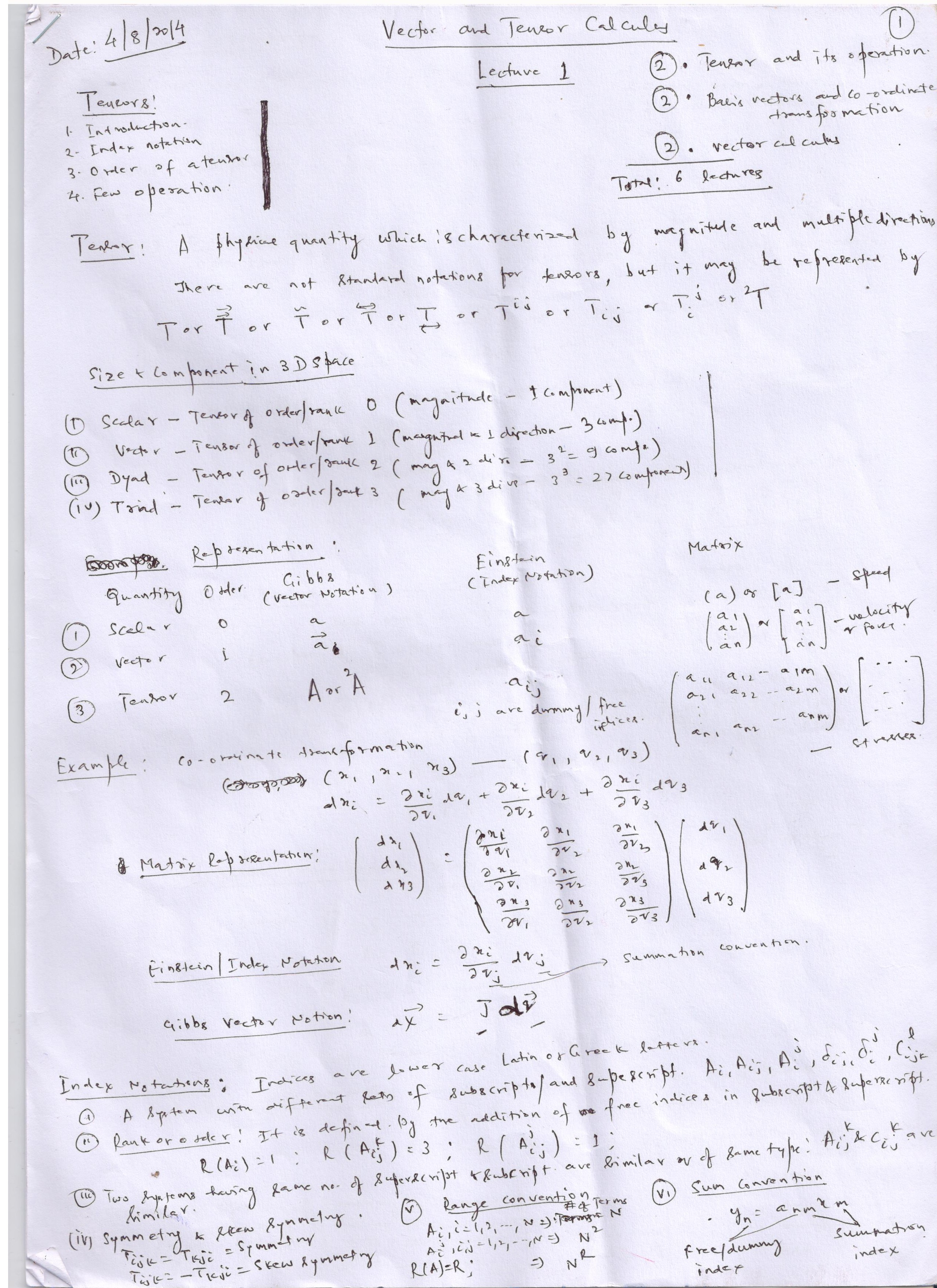
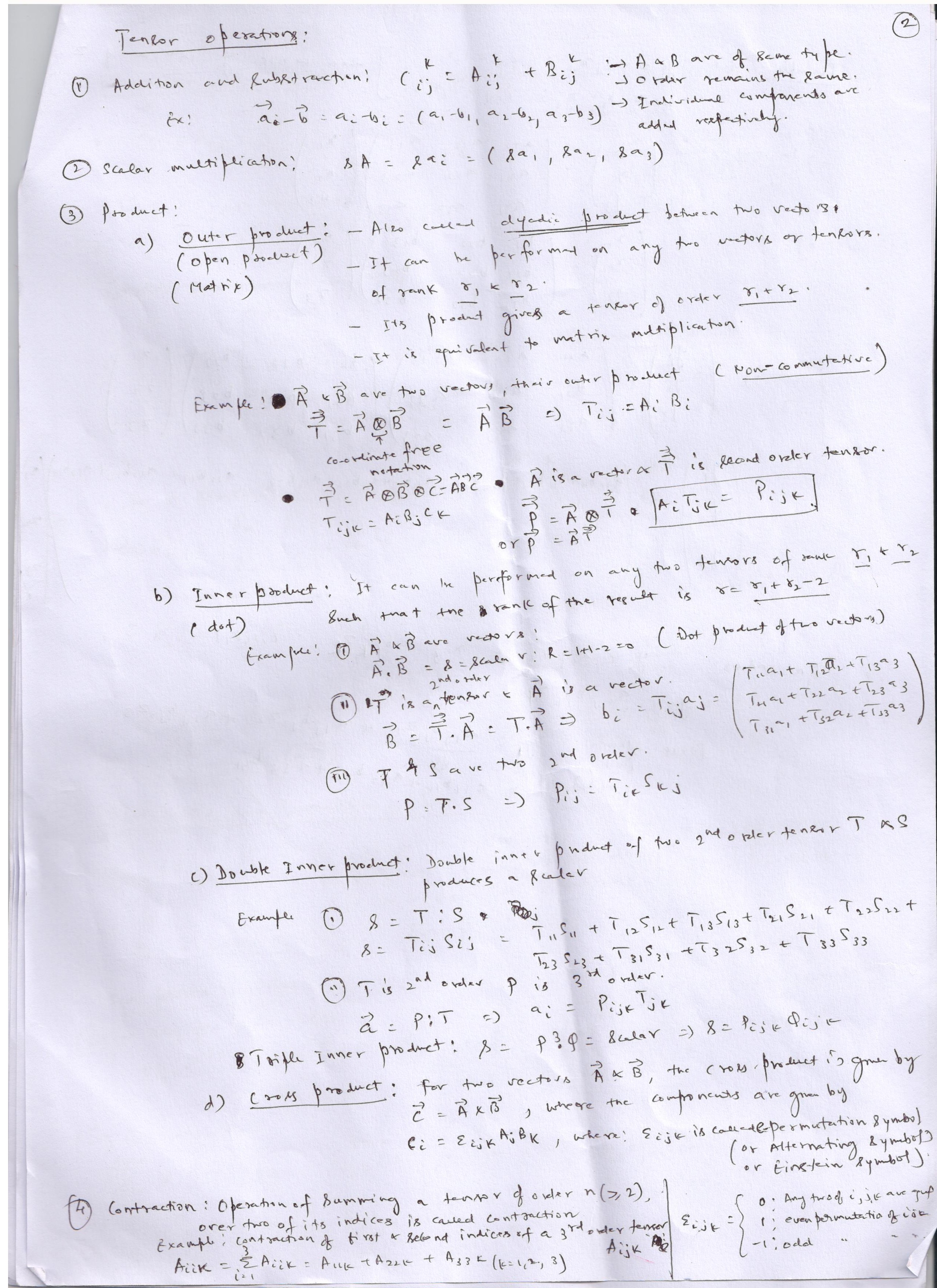
1. Tensors and its operations Lecture 1.1, Lecture 1.2, Lecture 1.3, Lecture 1.4, Lecture 1.5
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
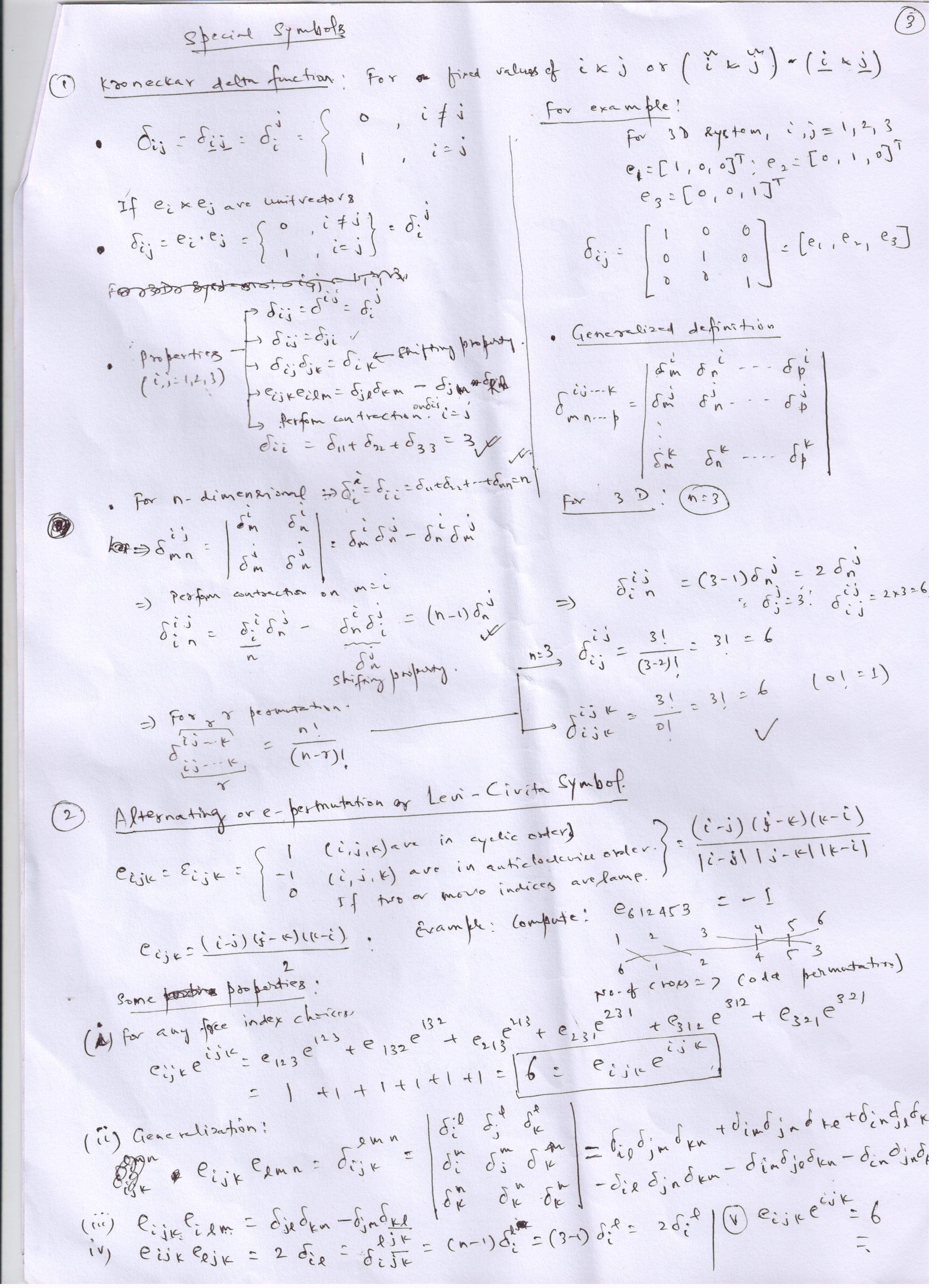
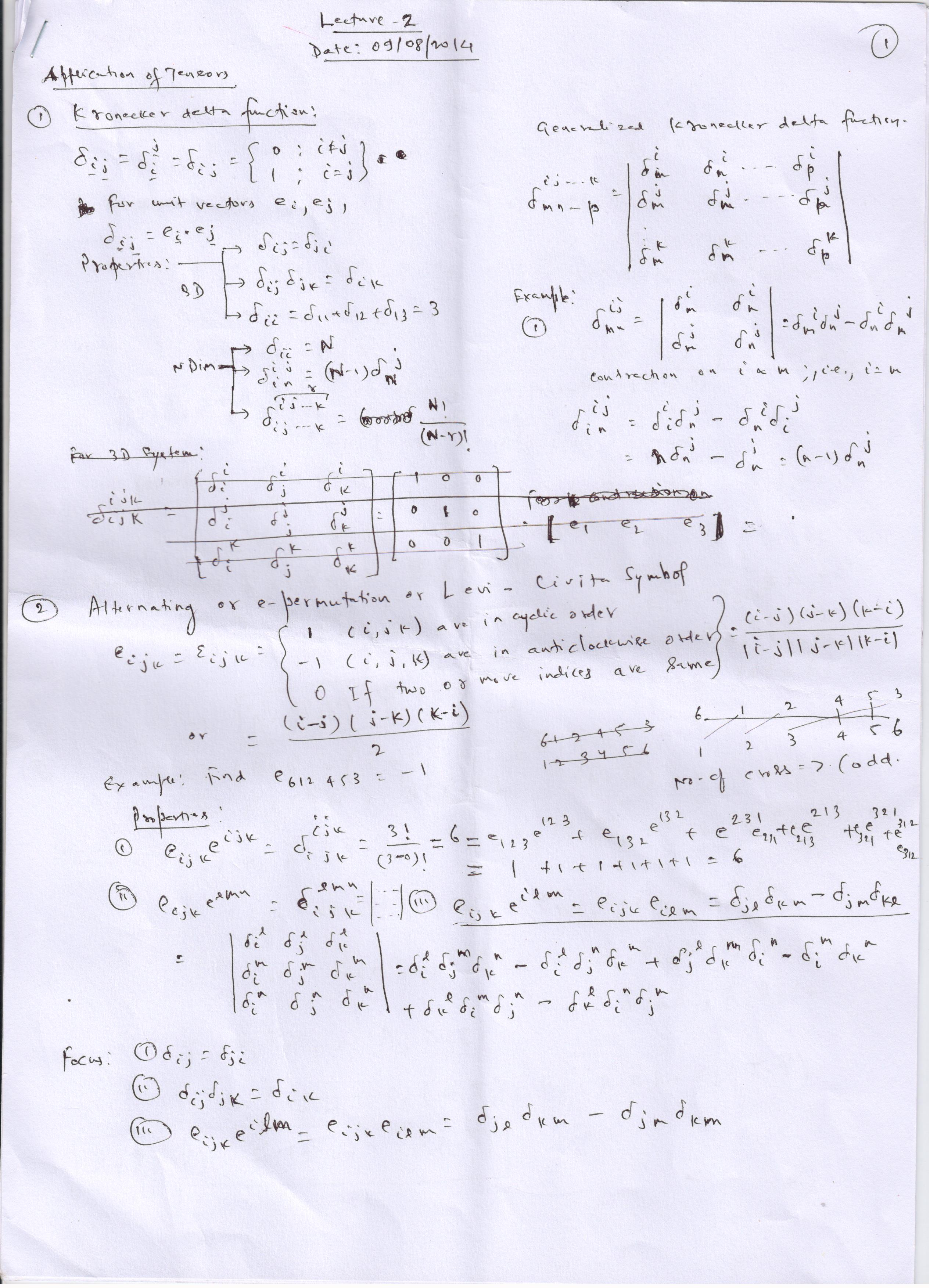
2. Tensors Applications Lecture 2.1, Lecture 2.2, Lecture 2.3, Lecture 2.4
{kind=link}
{kind=link}
{kind=link}
{kind=link}
QUIZ 1: Solution to Quiz 1,
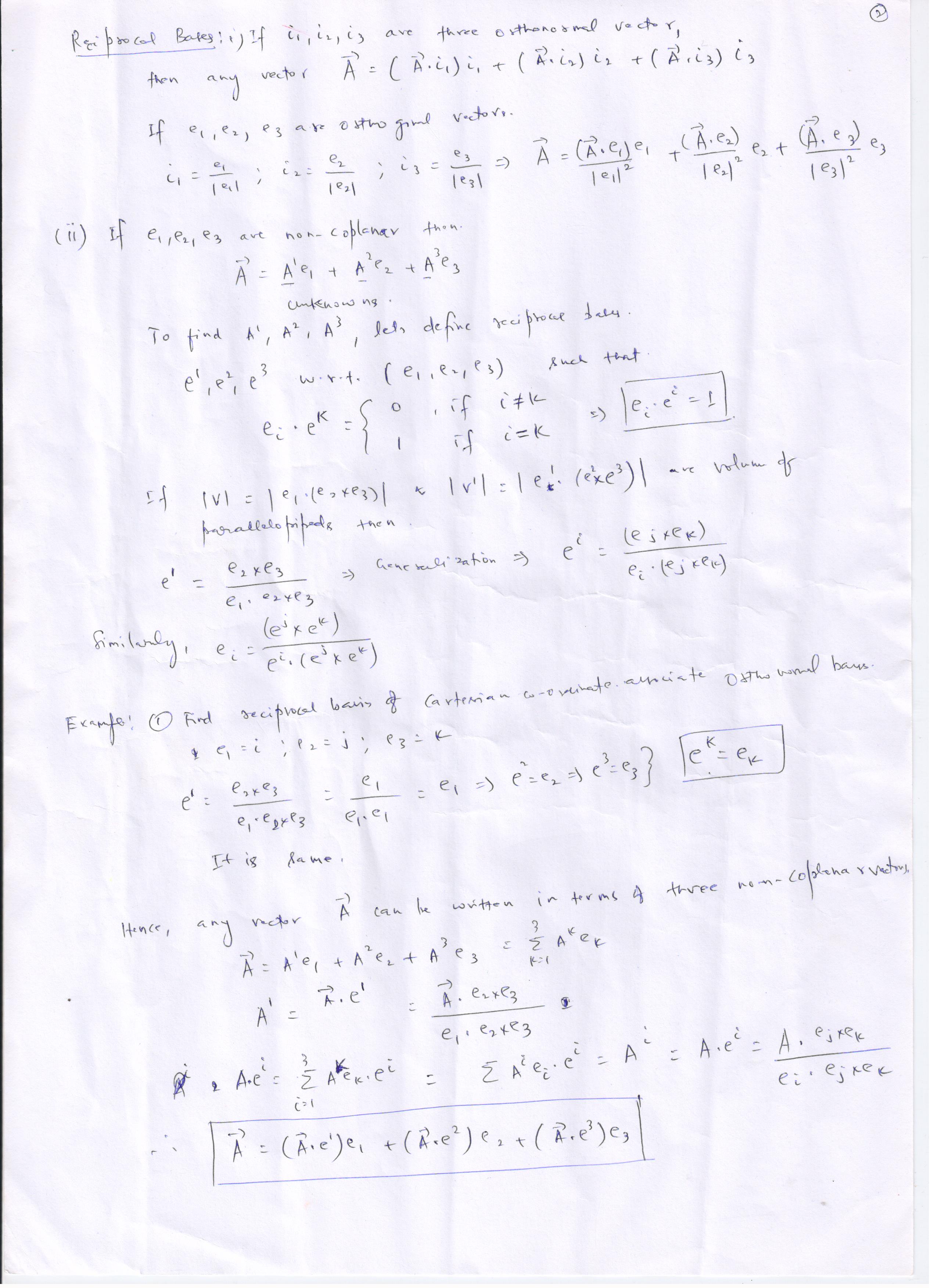
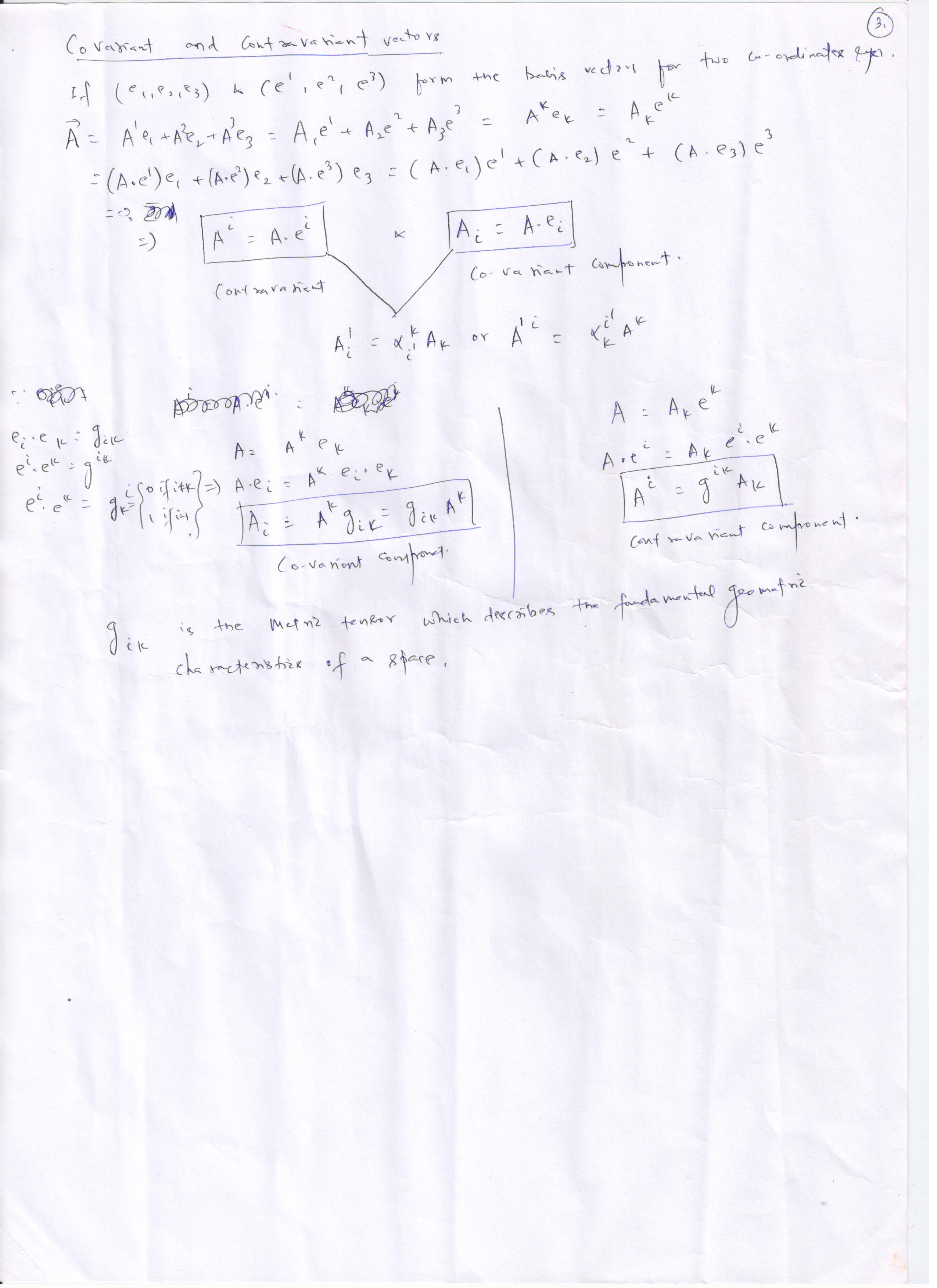
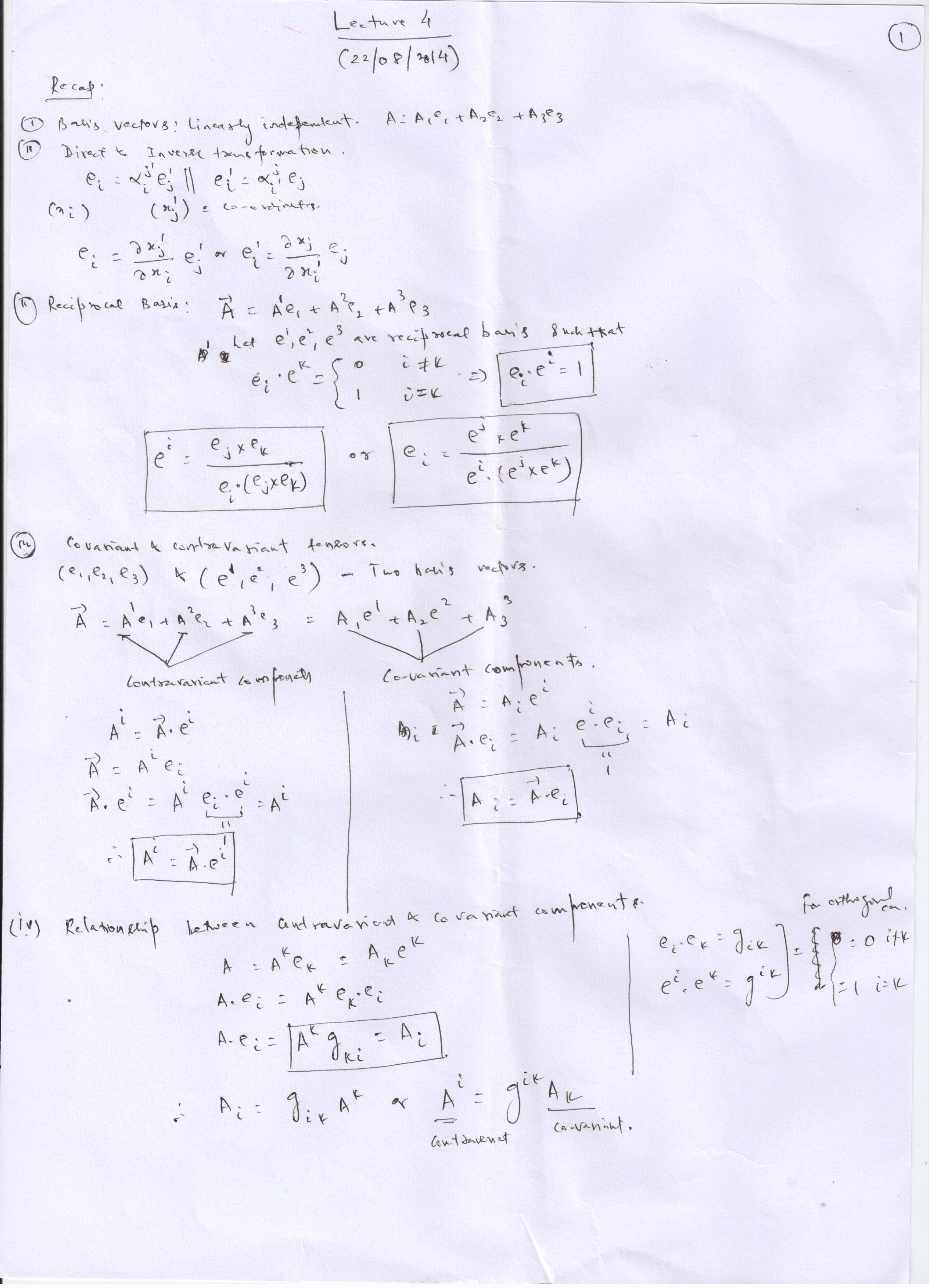
3. Basis Vectors, Transformation, Covariant and Contravariant Lecture 3.1, Lecture 3.2, Lecture 3.3,
{kind=link}
{kind=link}
{kind=link}
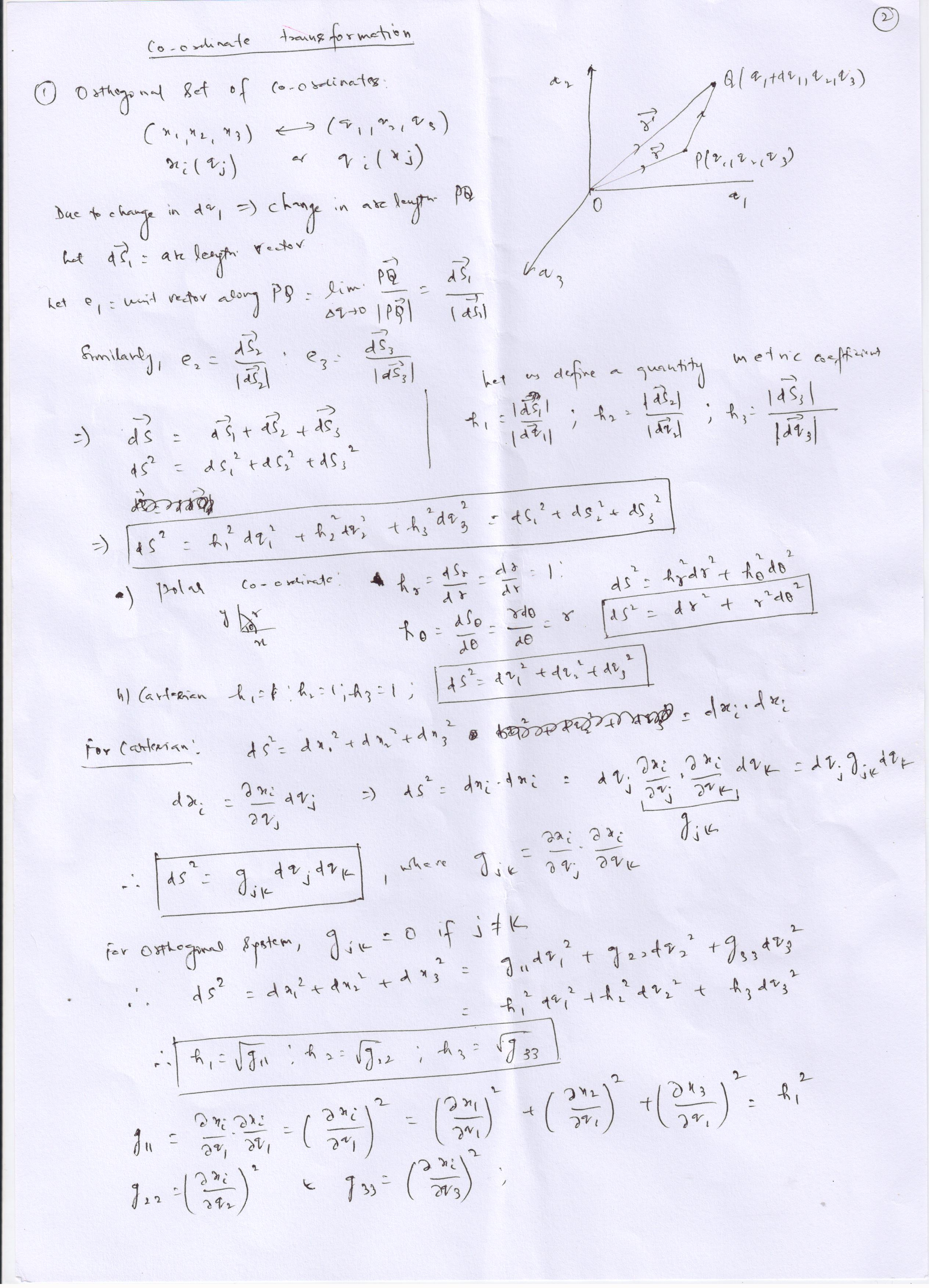
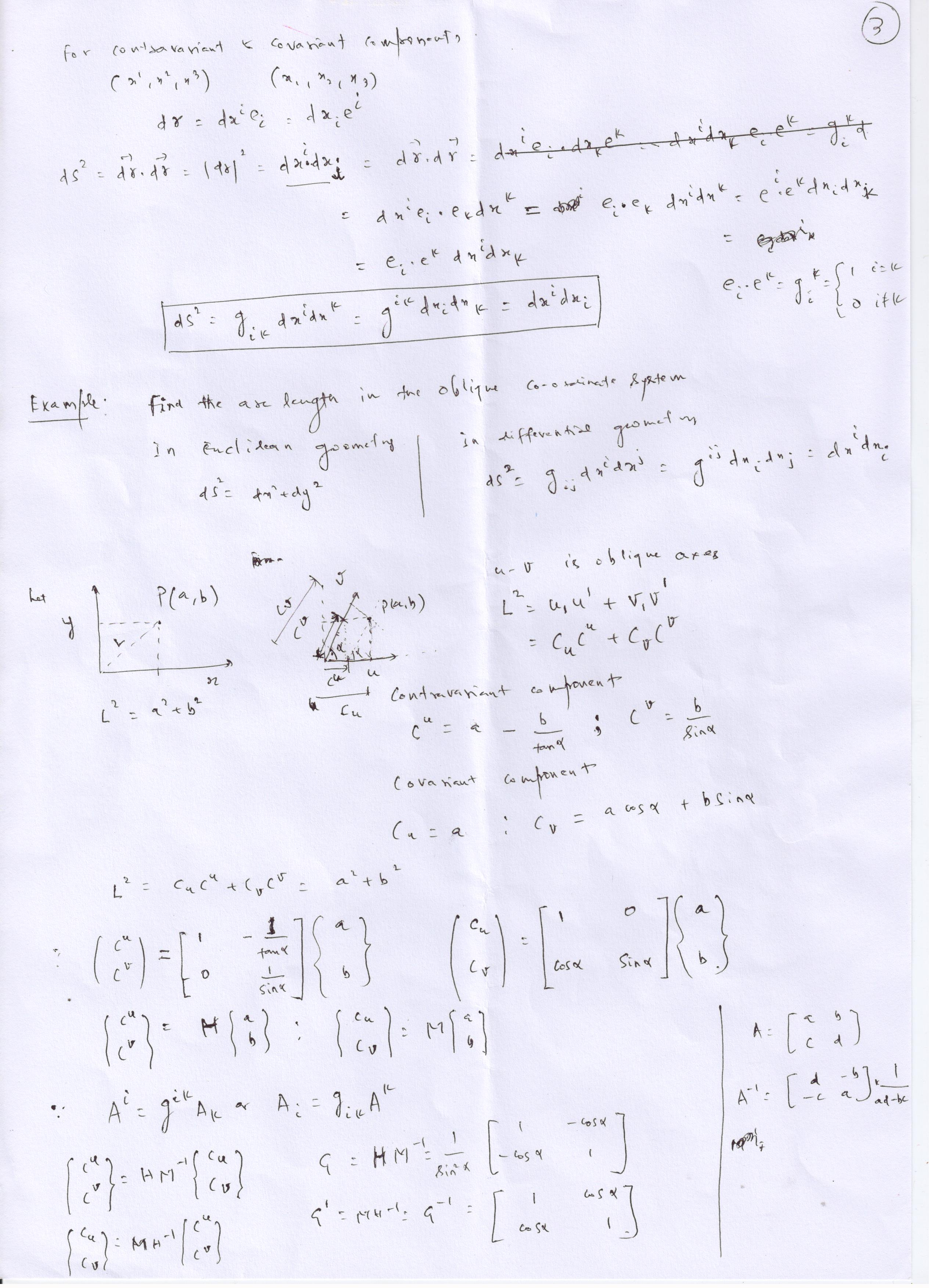
4. Concept of Metric Tensor in Co-ordinate Transformation Lecture 4.1, Lecture 4.2, Lecture 4.3, Lecture 4.4
{kind=link}
{kind=link}
{kind=link}
{kind=link}
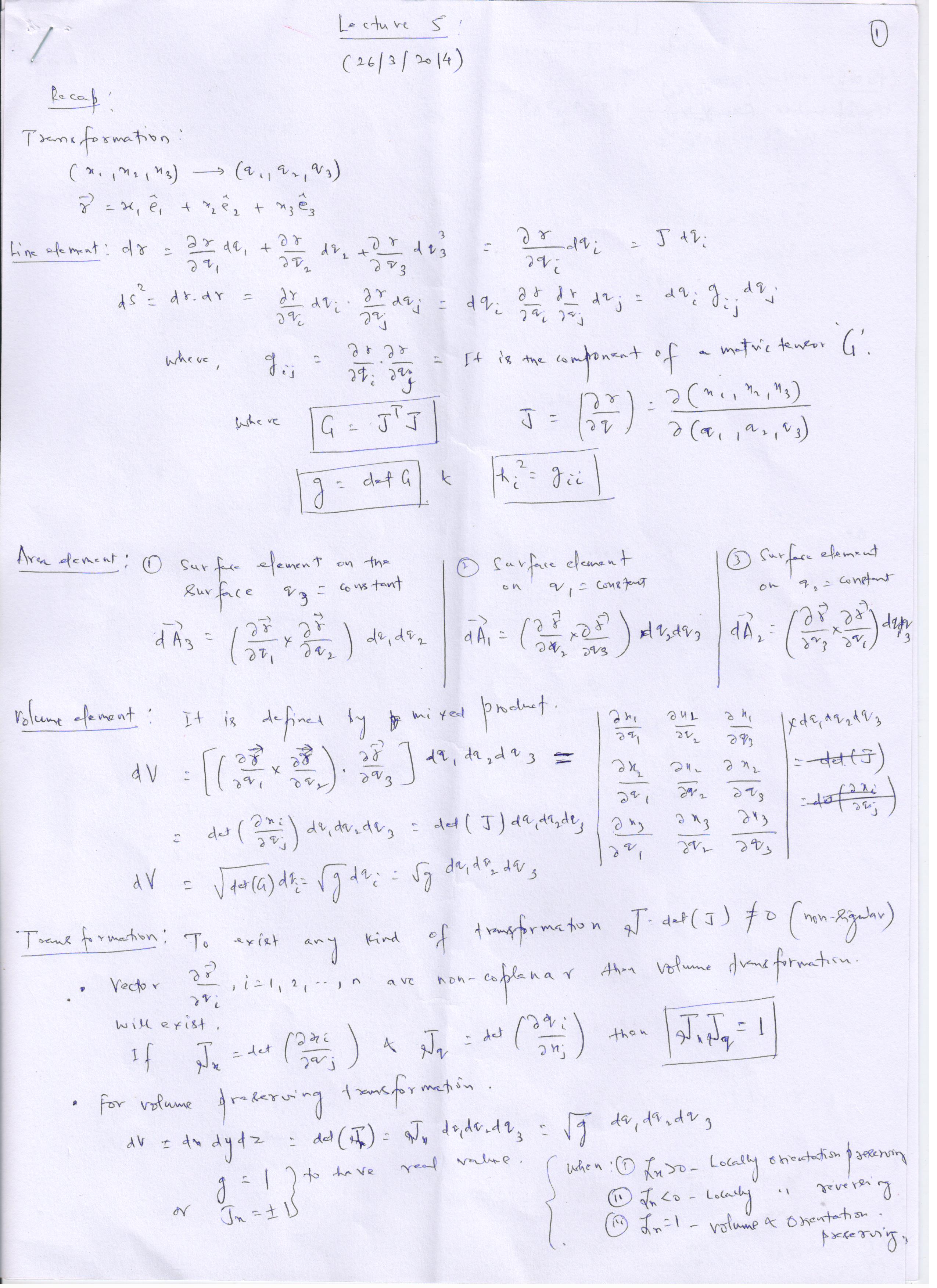
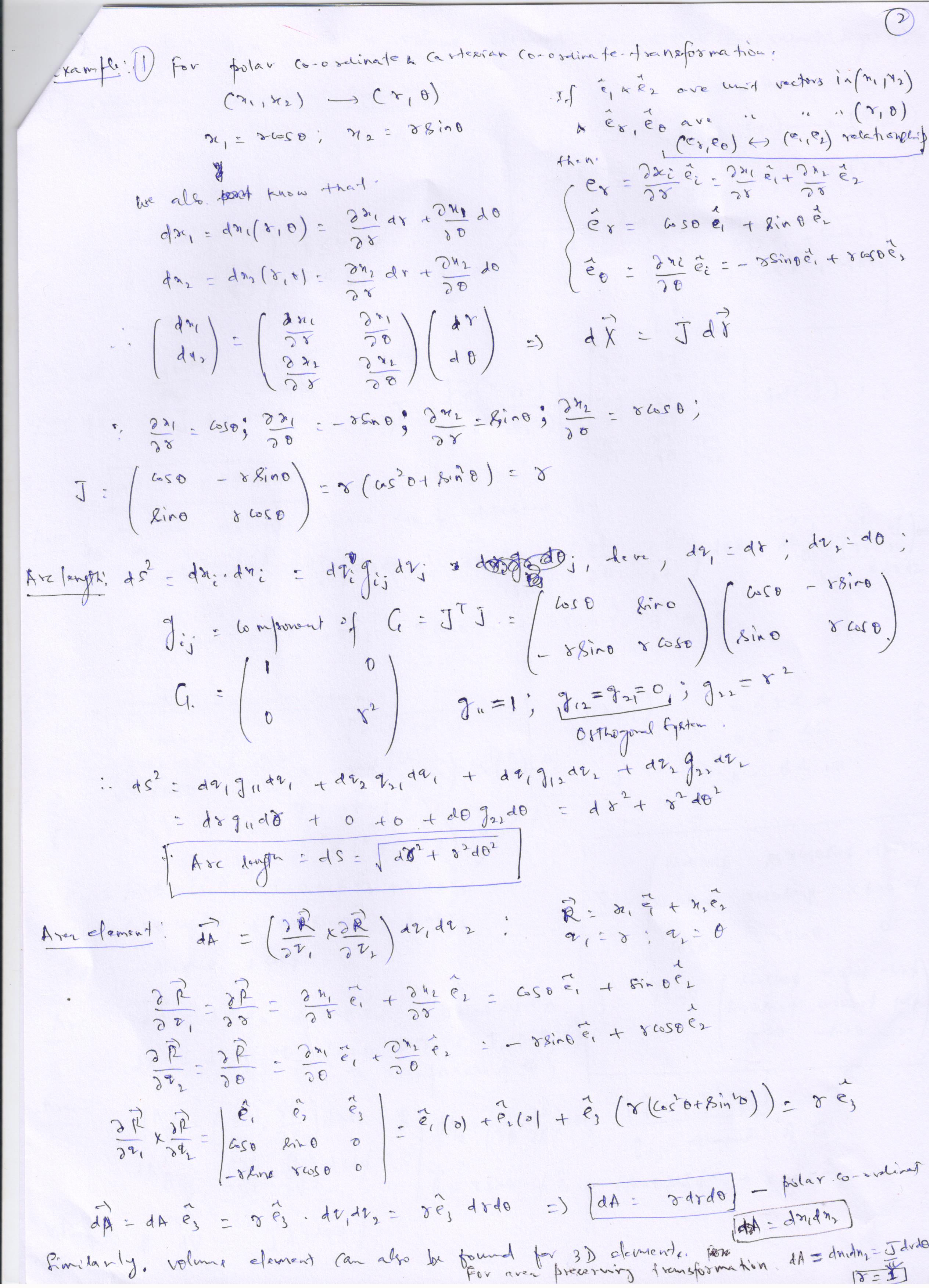
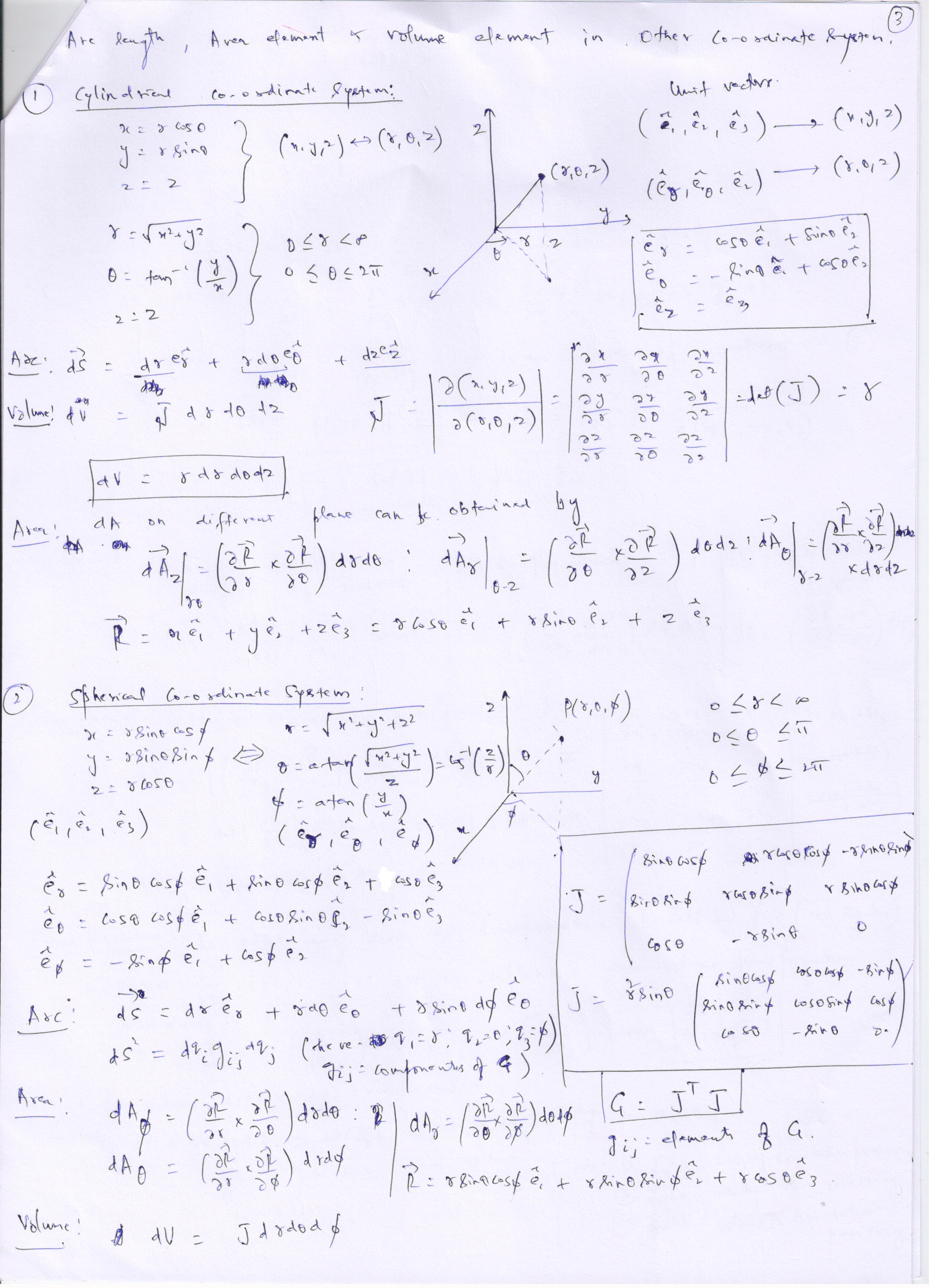
5. Arc Length, Area and Volume element under Co-ordinate transformation Lecture 5.1, Lecture 5.2, Lecture 5.3,
{kind=link}
{kind=link}
{kind=link}
QUIZ 2: Solution to Quiz 2,
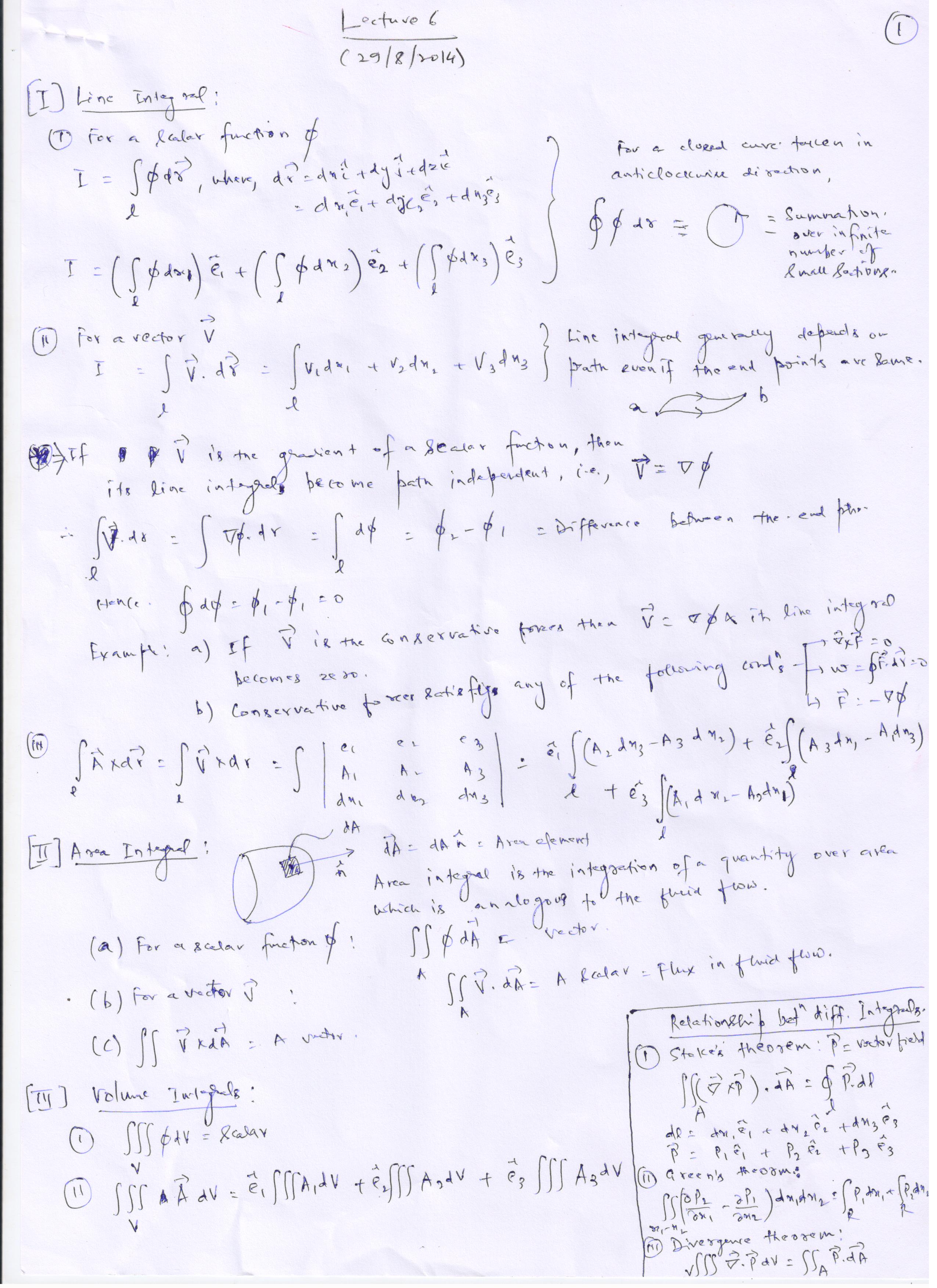
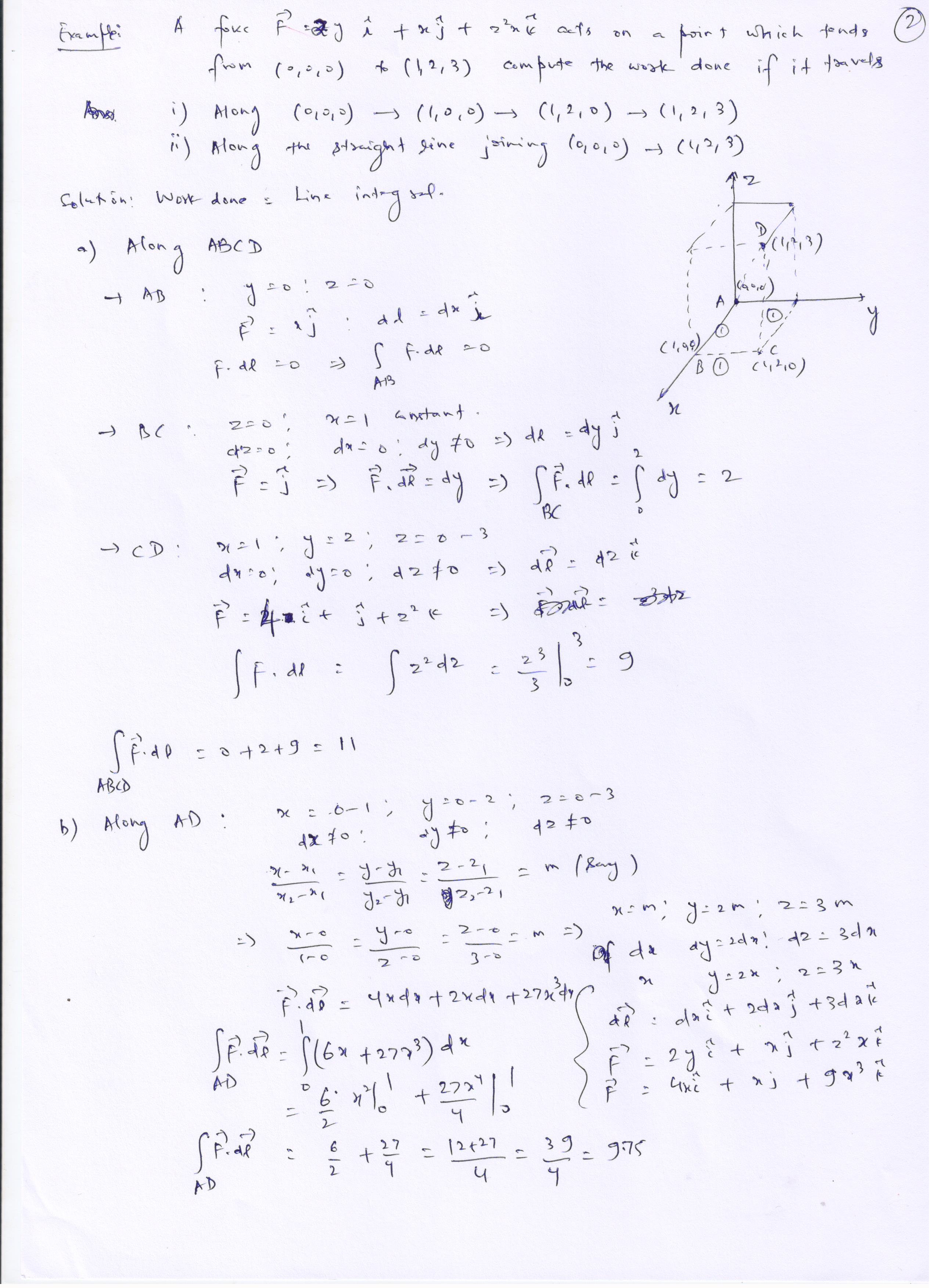
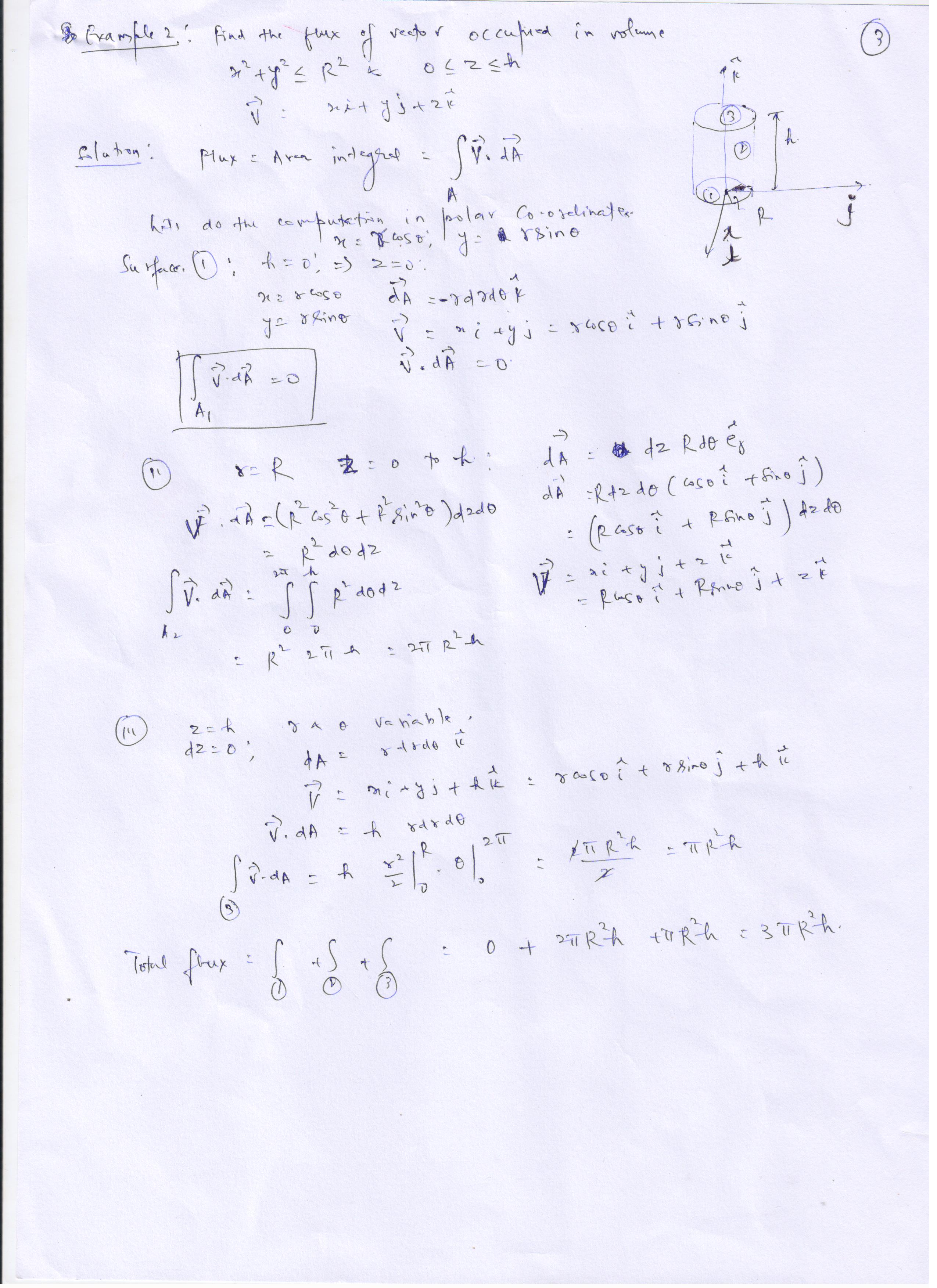
6. Vector Calculus-Line, Area and Volume Integrals Lecture 6.1, Lecture 6.2, Lecture 6.3,
{kind=link}
{kind=link}
{kind=link}
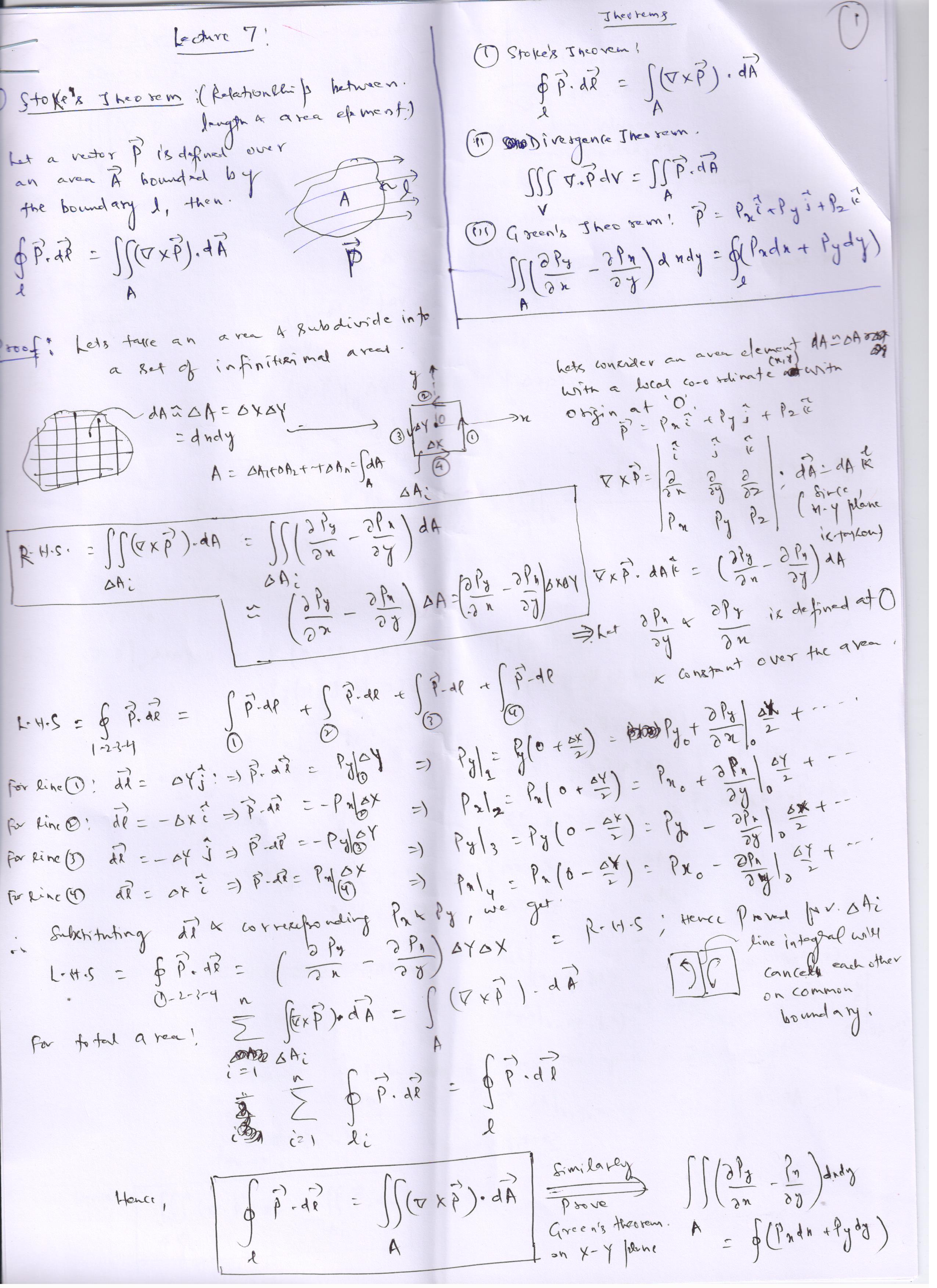
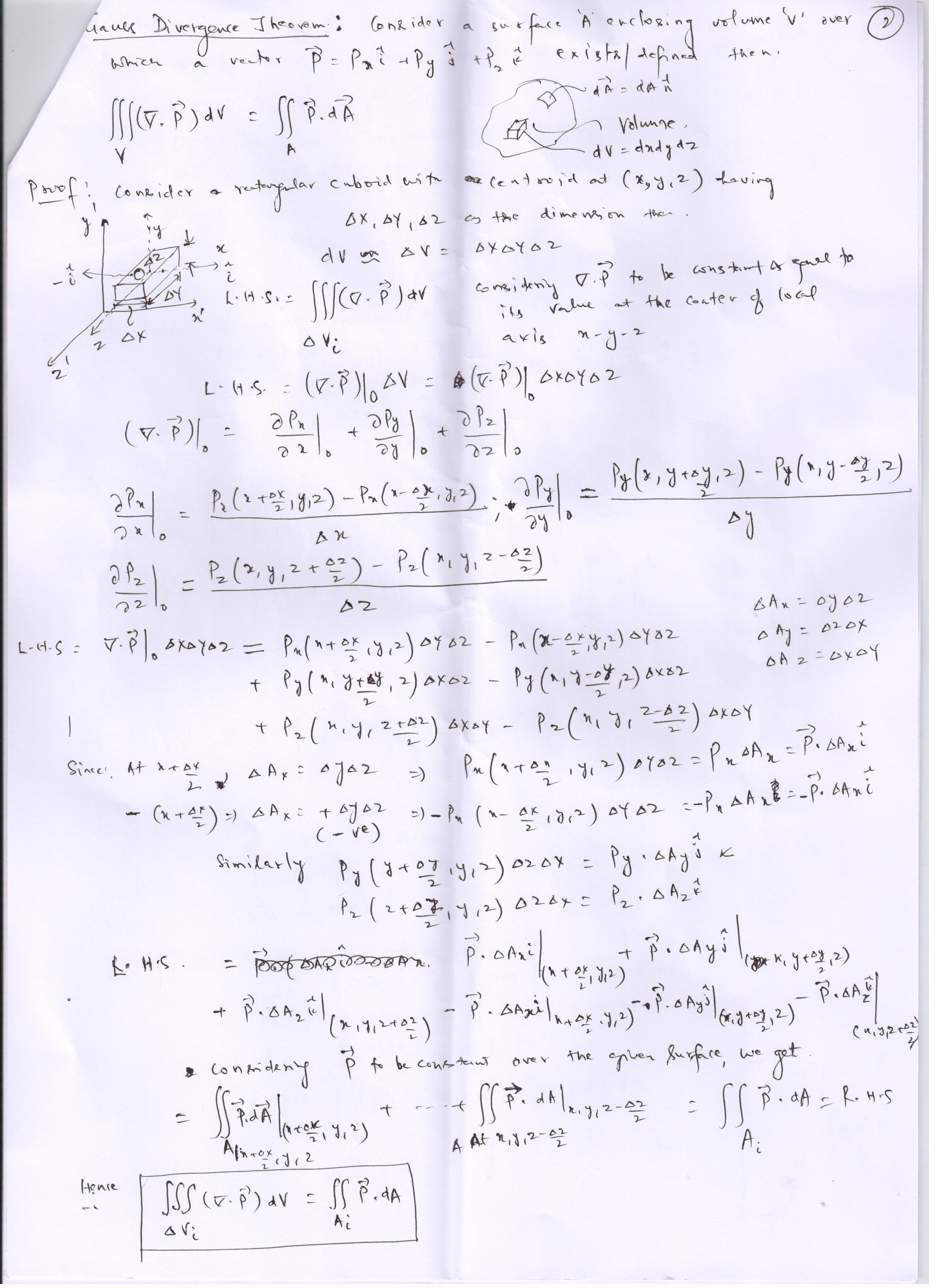
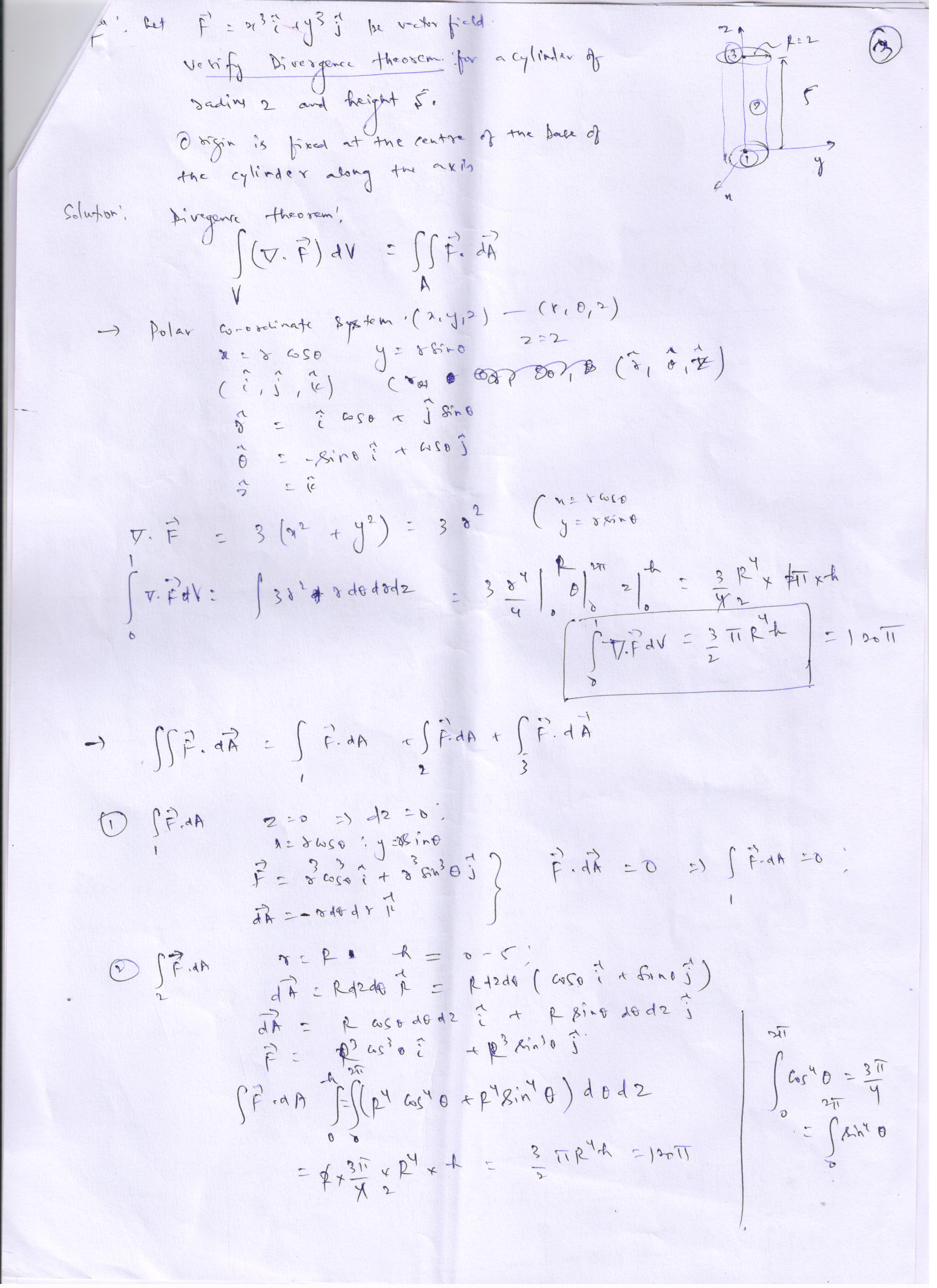
7. Vector Calculus-Stokes Theorem, Divergence Theorem and Green's Theorems Lecture 7.1, Lecture 7.2, Lecture 7.3, Lecture 7.4,
{kind=link}
{kind=link}
{kind=link}
{kind=link}
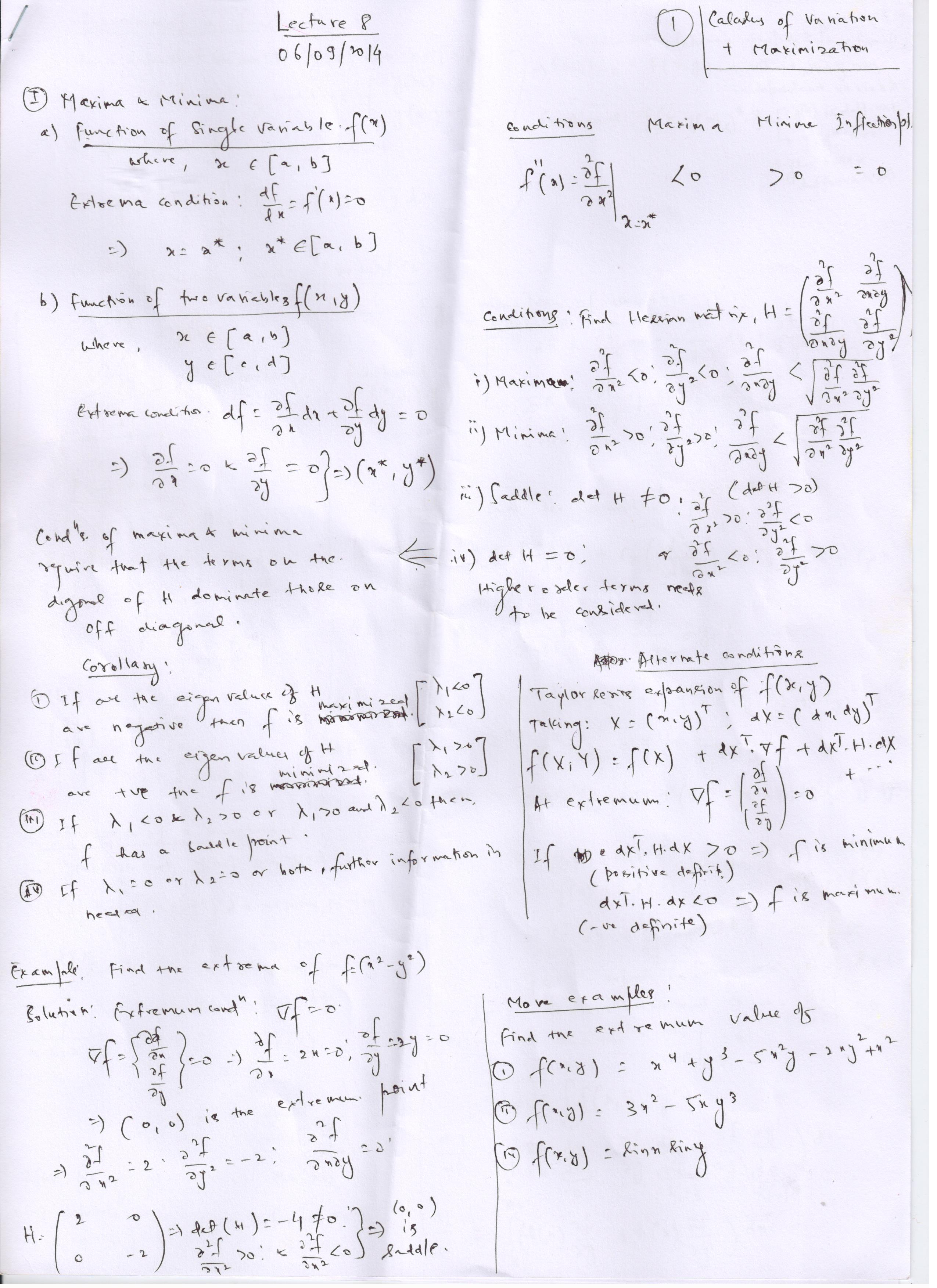
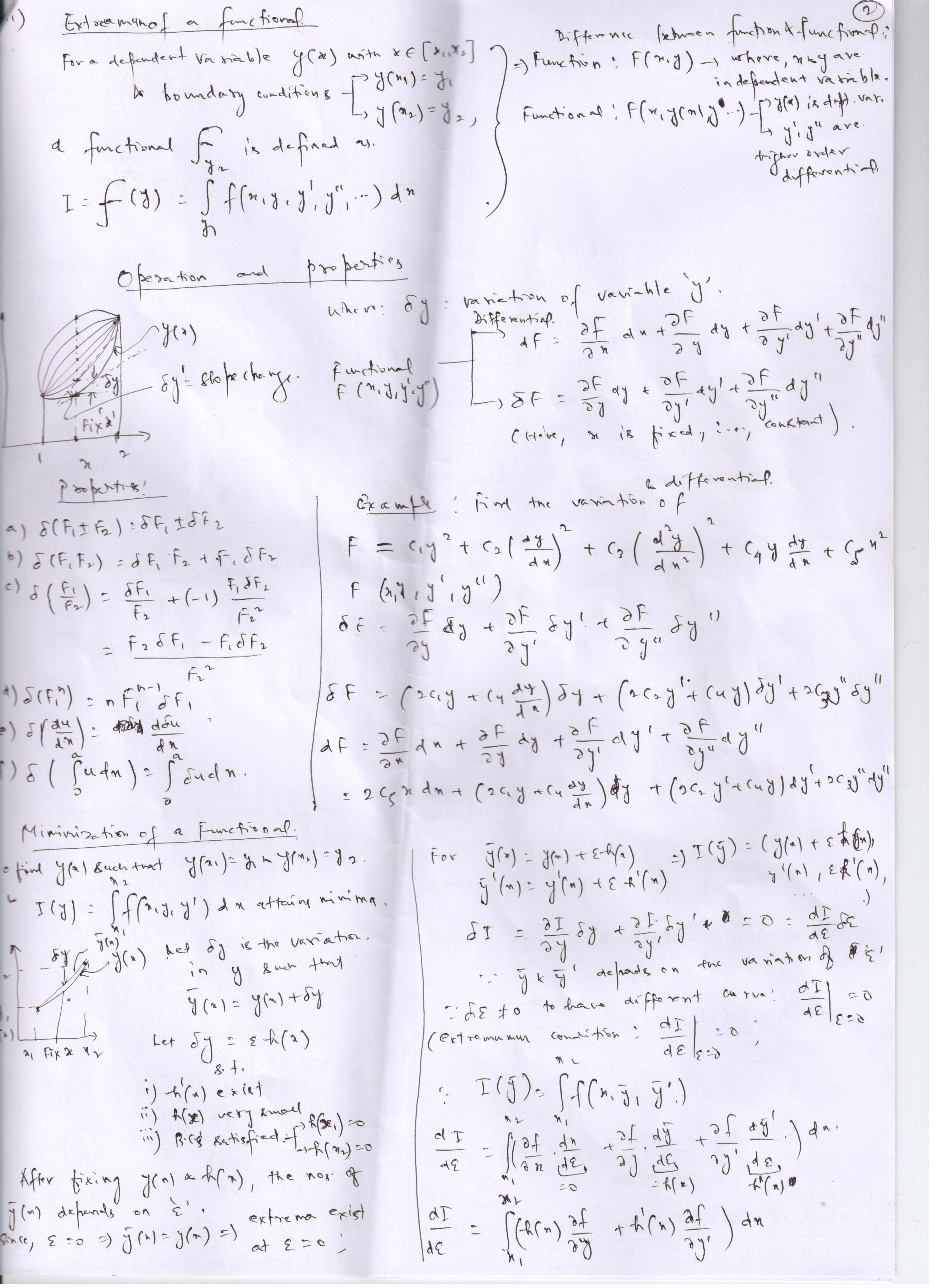
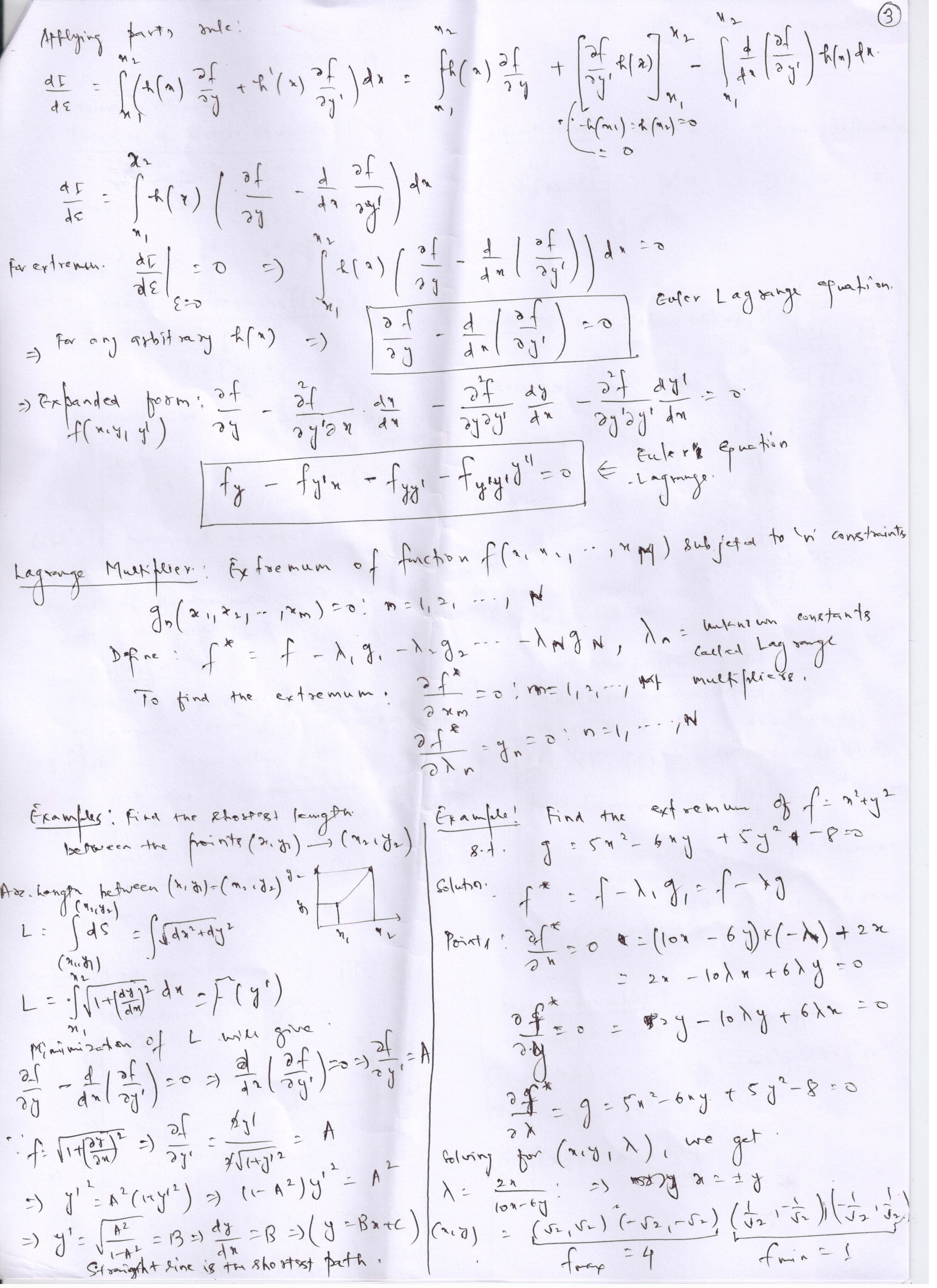
8. Extremization of multivariable function and functional Lecture 8.1, Lecture 8.2, Lecture 8.3,
{kind=link}
{kind=link}
{kind=link}
QUIZ 3: Quiz 3,
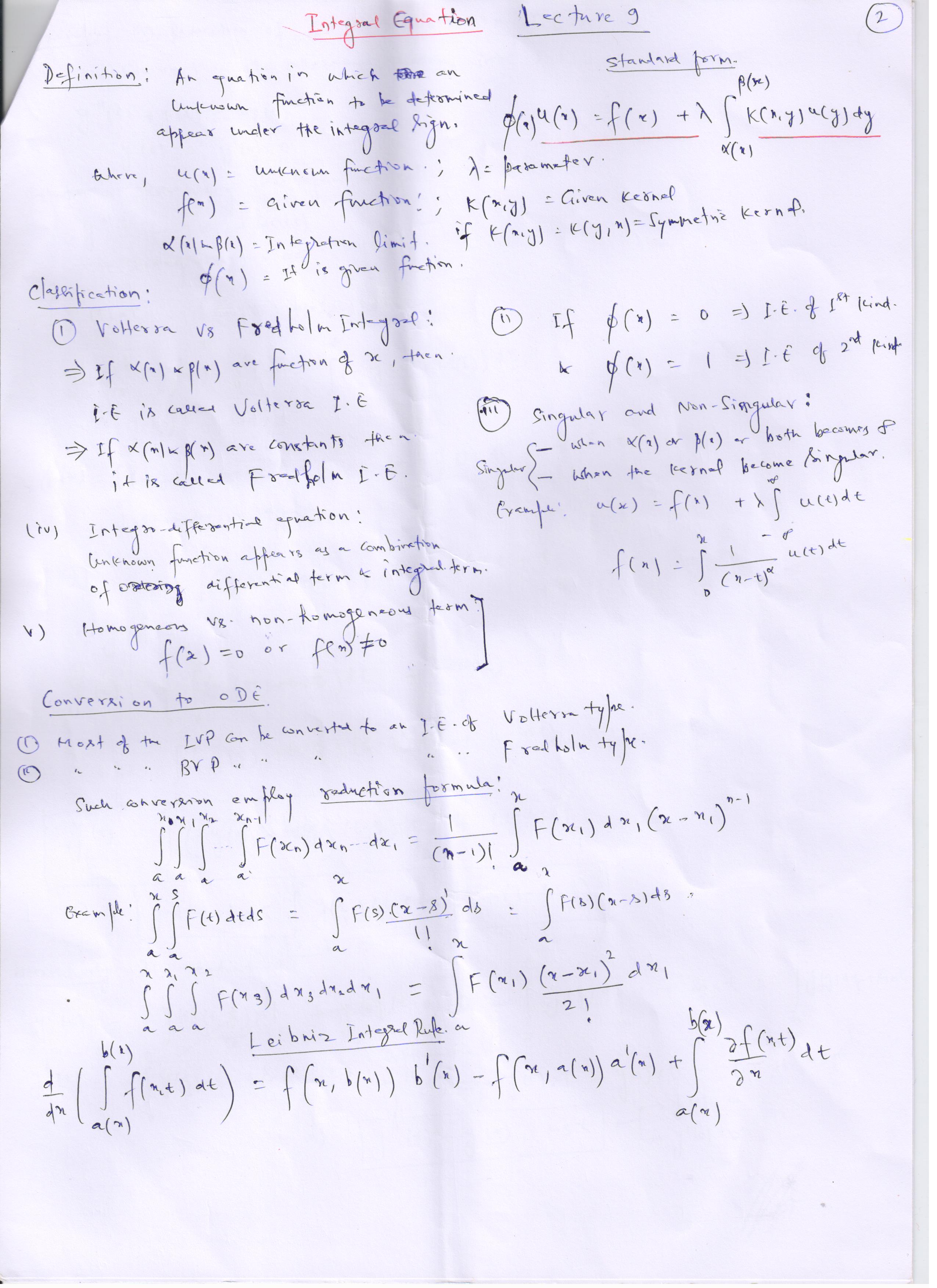
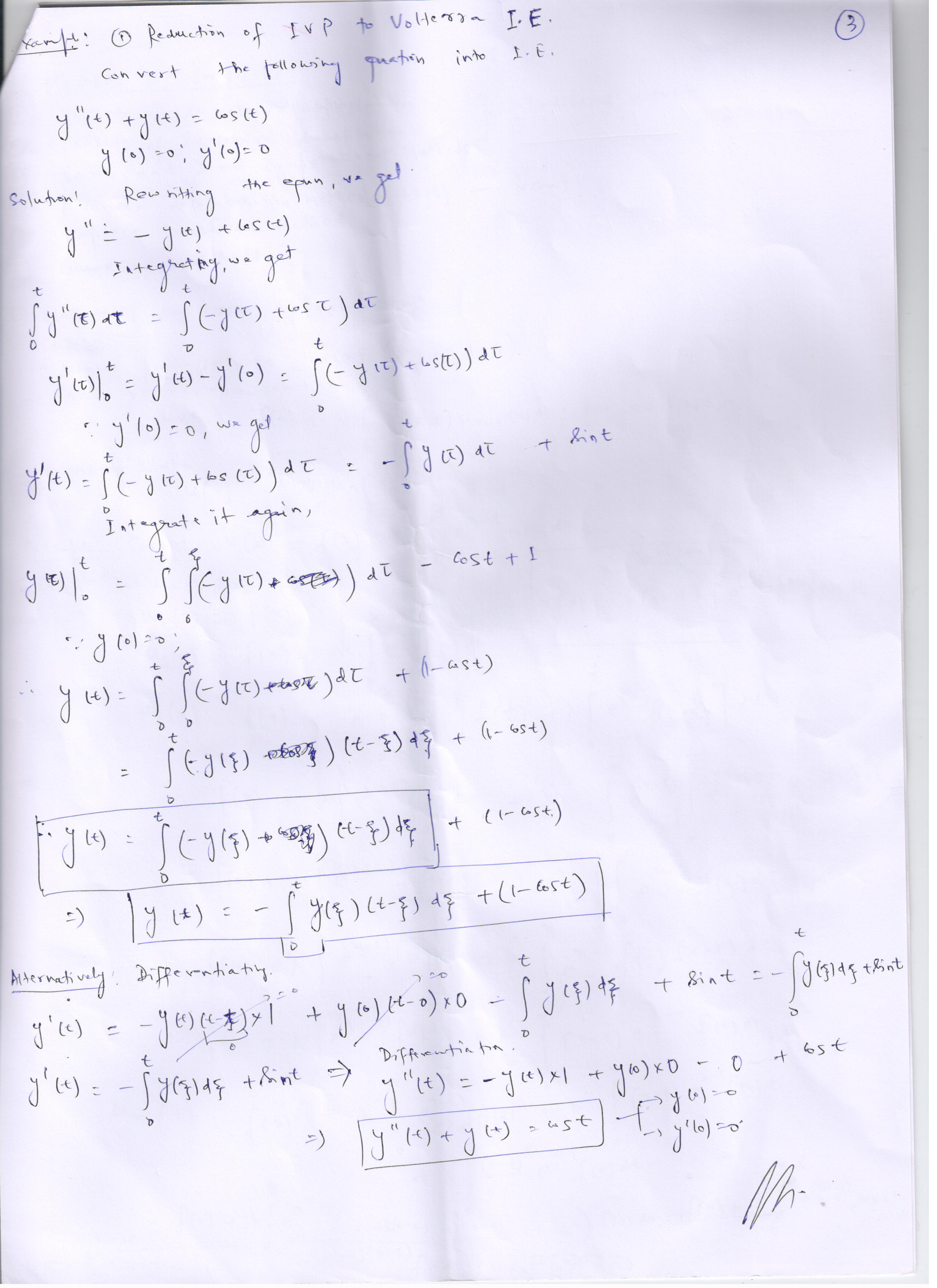
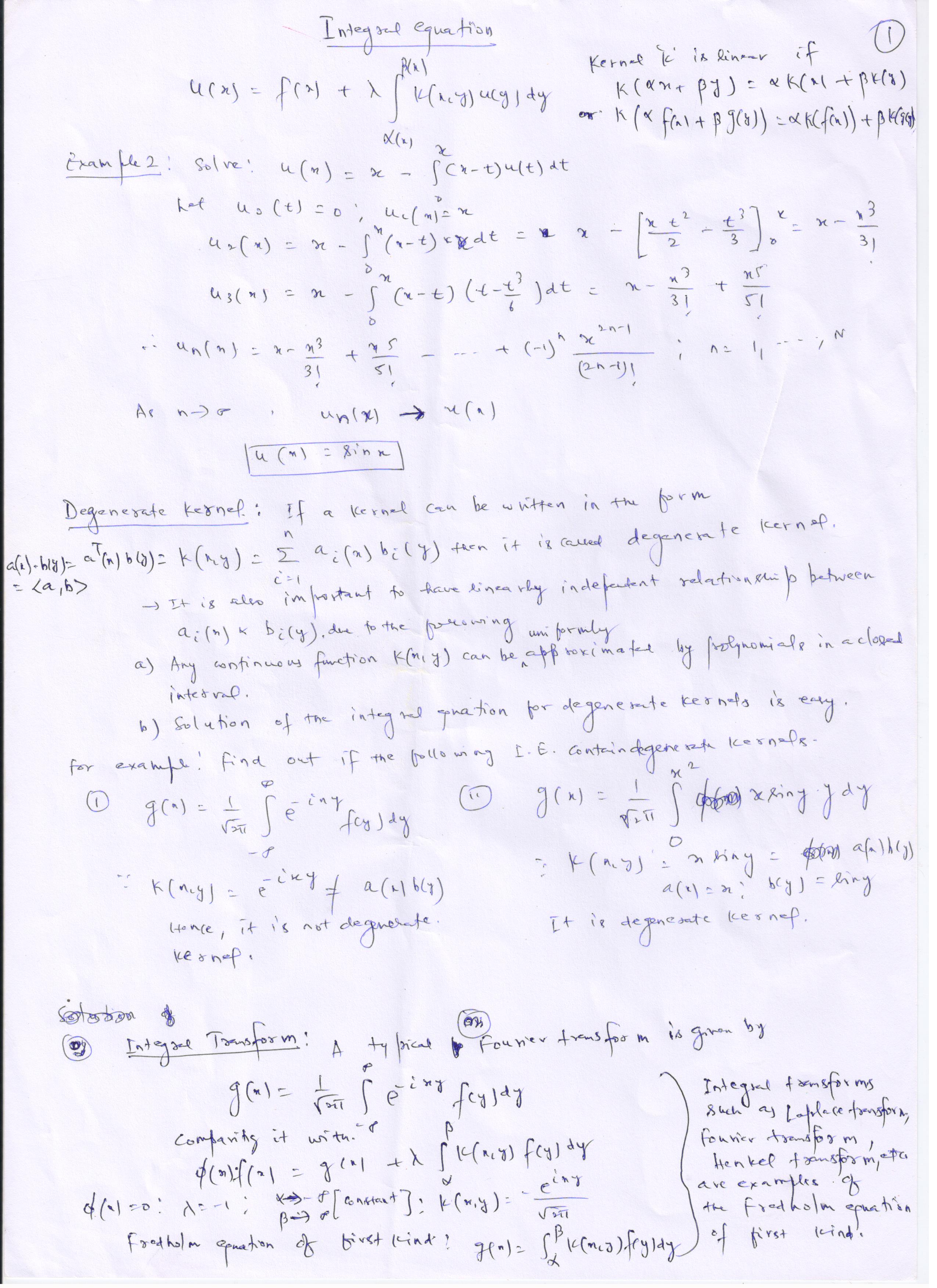
9. Integral Equations and its Solution Lecture 9.1, Lecture 9.2, Lecture 9.3,
{kind=link}
{kind=link}
{kind=link}
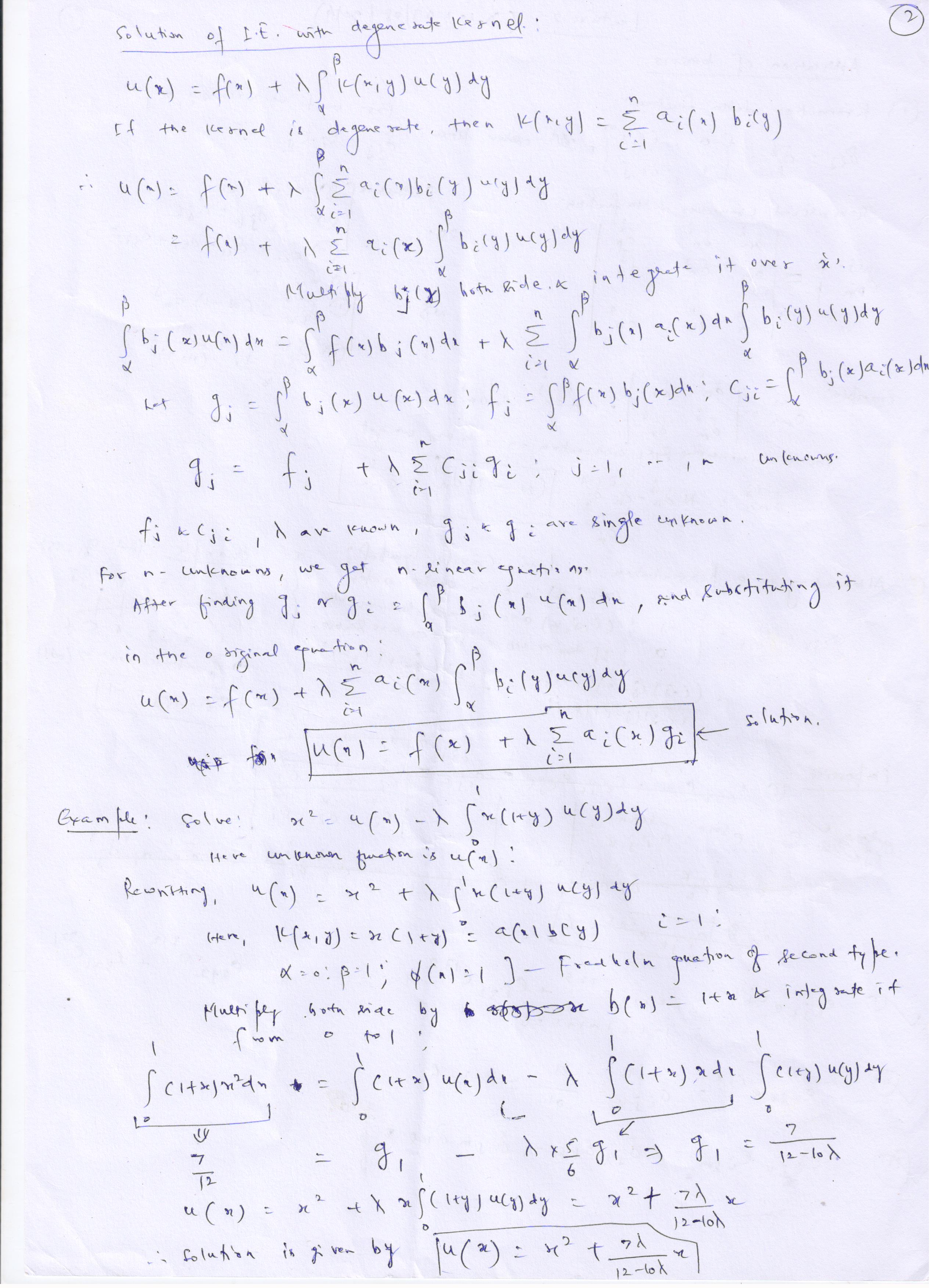
10. Degenrate Integral Equations and Its Solution Lecture 10.1, Lecture 10.2, Lecture 10.3,
{kind=link}
{kind=link}
{kind=link}
A. TUTORIALS FOR SELF READING Tutorial
B.MID-SEMESTER EXAMINATION: Mid-Sem Exam Paper,
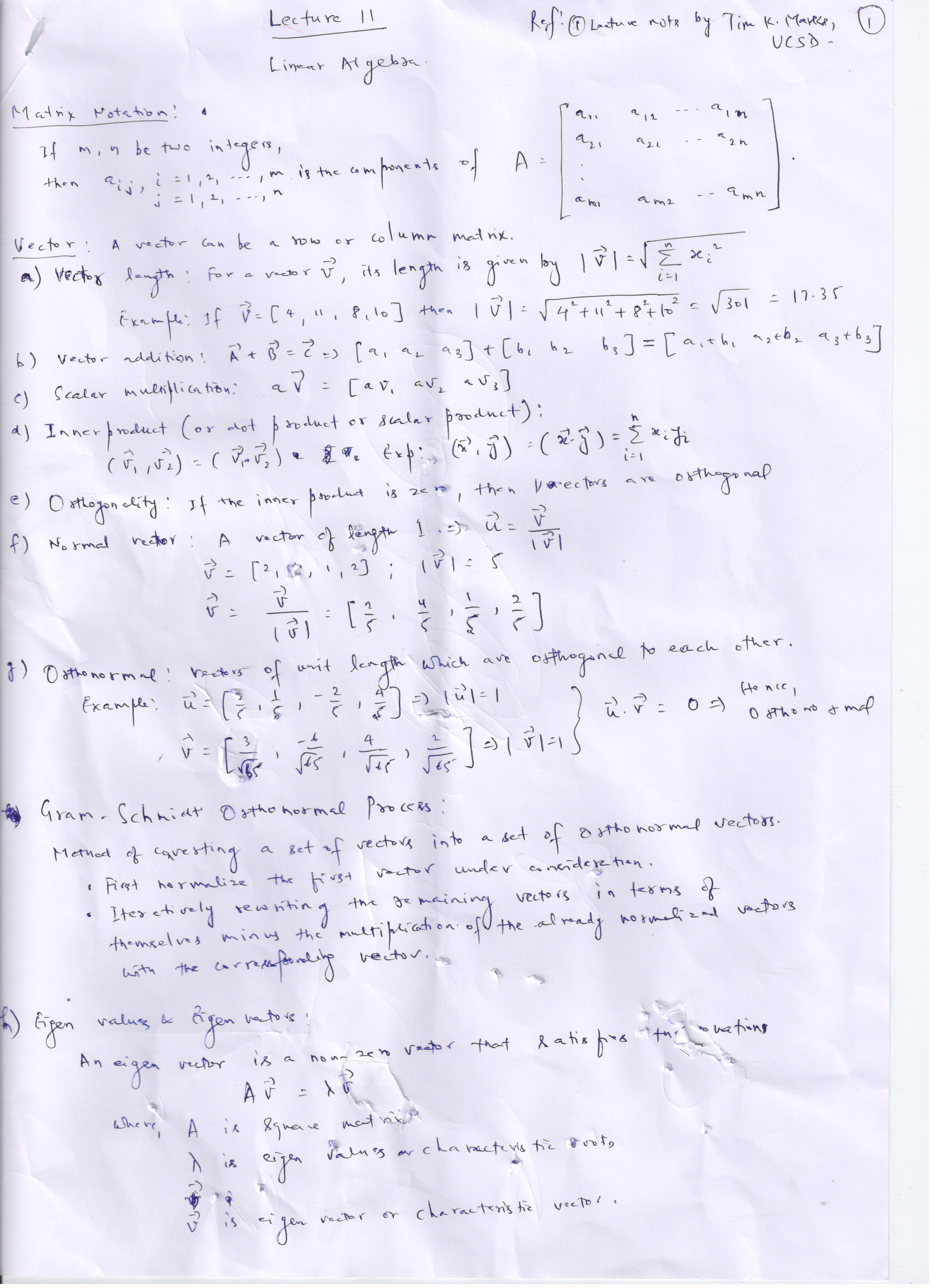
11. Linear Algebra- Eigen Vectors and Normalized Vectors Lecture 11.1, Lecture 11.2,
{kind=link}
{kind=link}
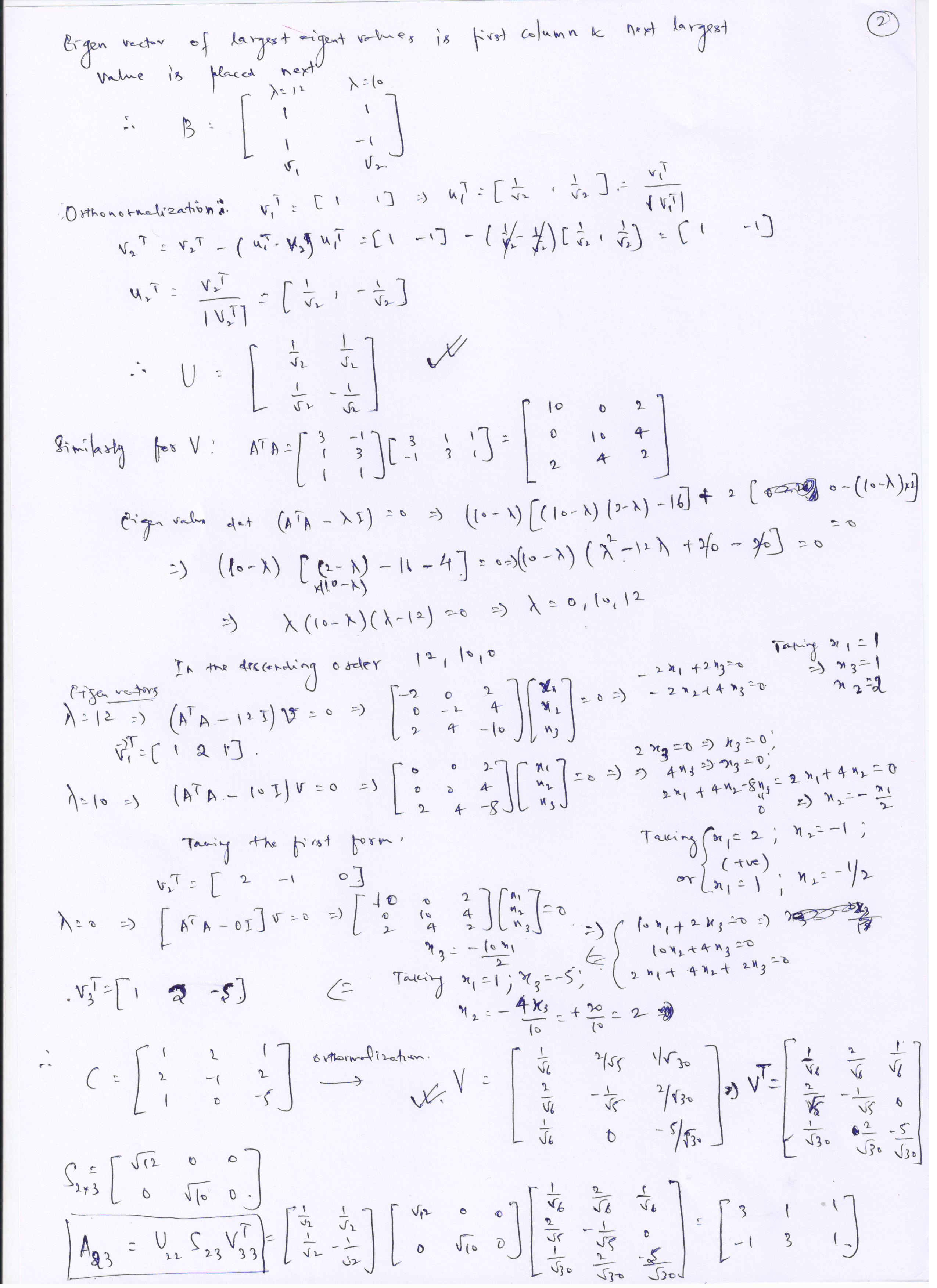
12. Linear Algebra- Singular Value Decomposition Lecture 12.1, Lecture 12.2, Lecture 12.3,
{kind=link}
{kind=link}
{kind=link}
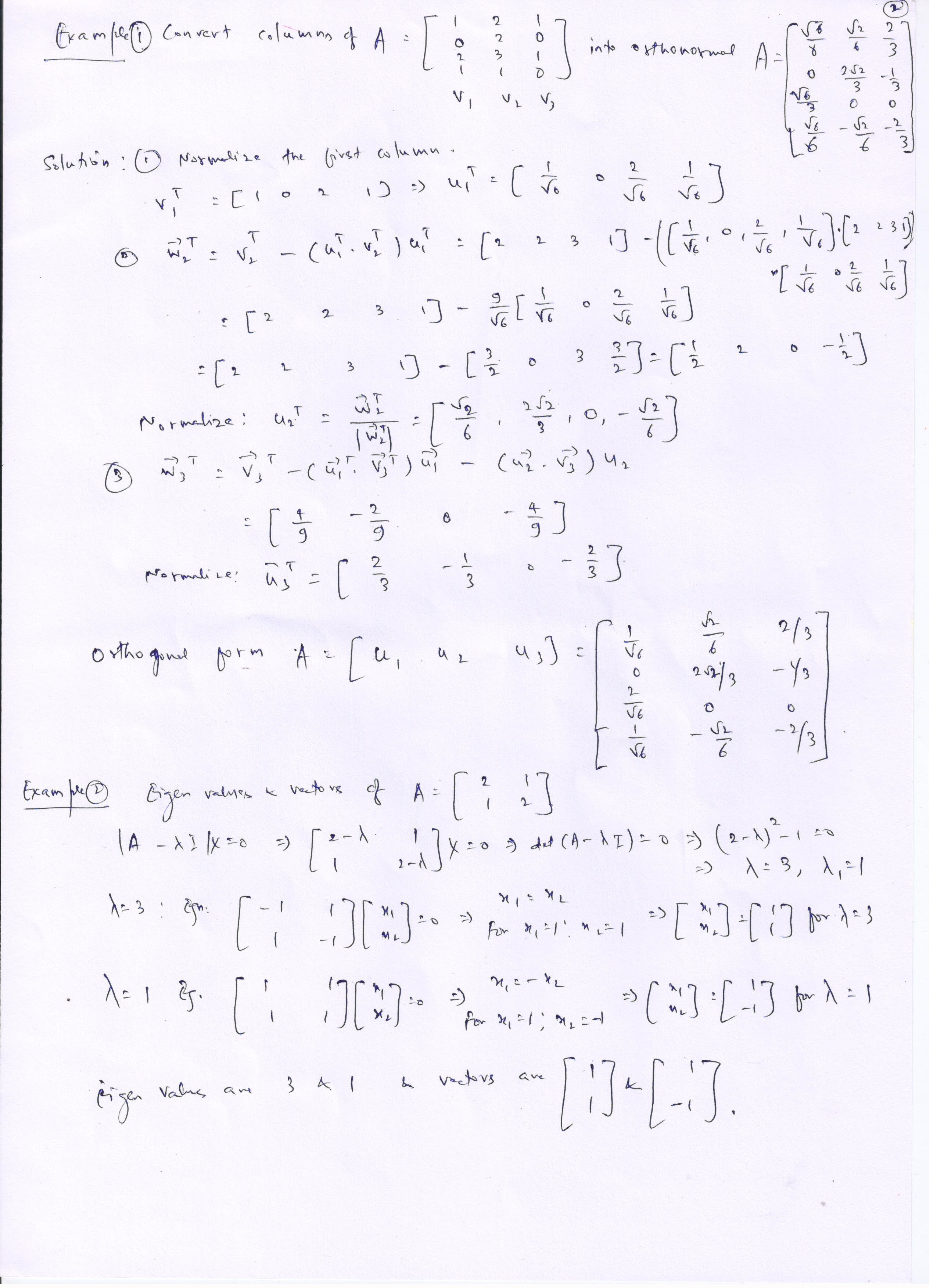
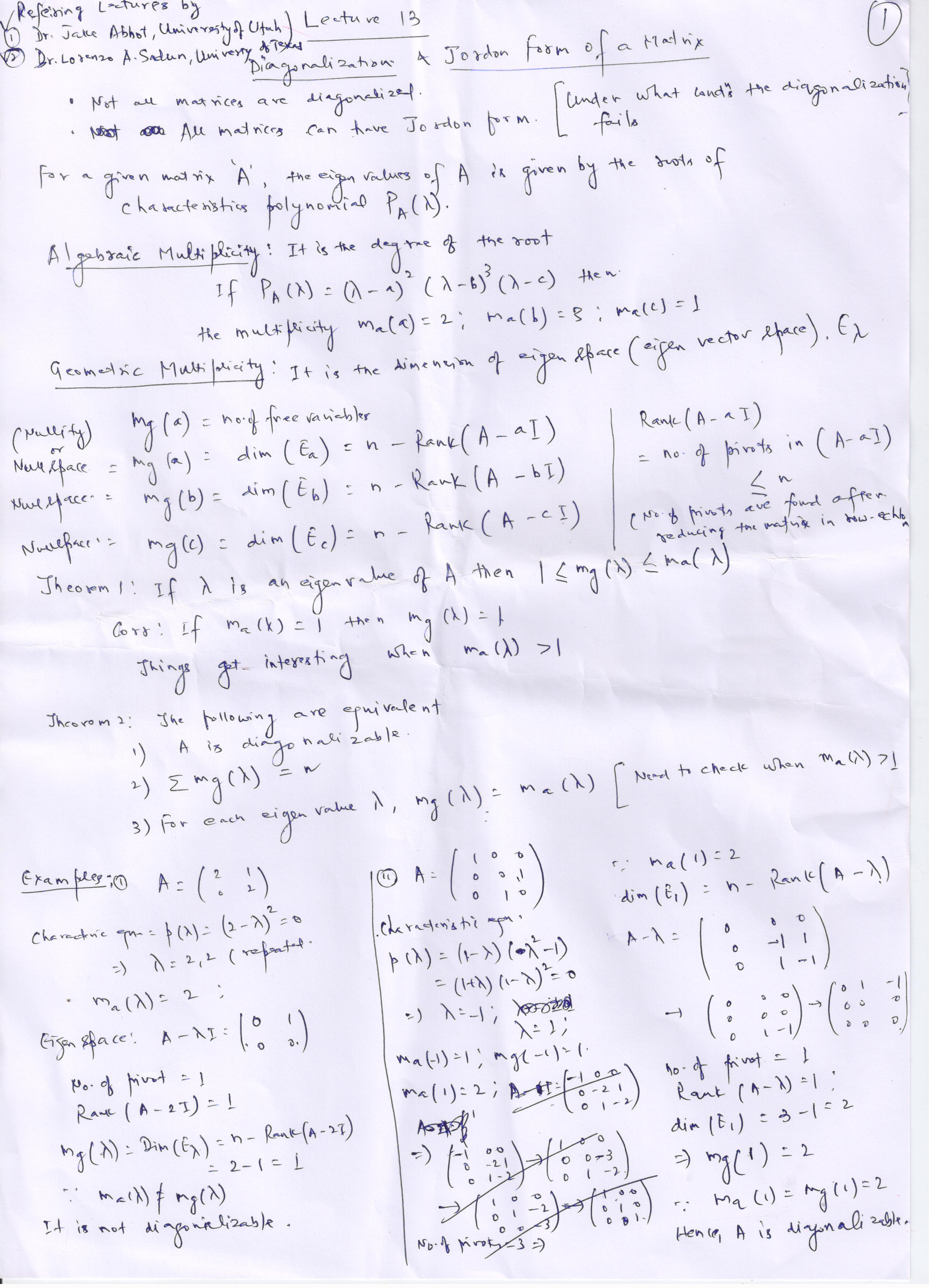
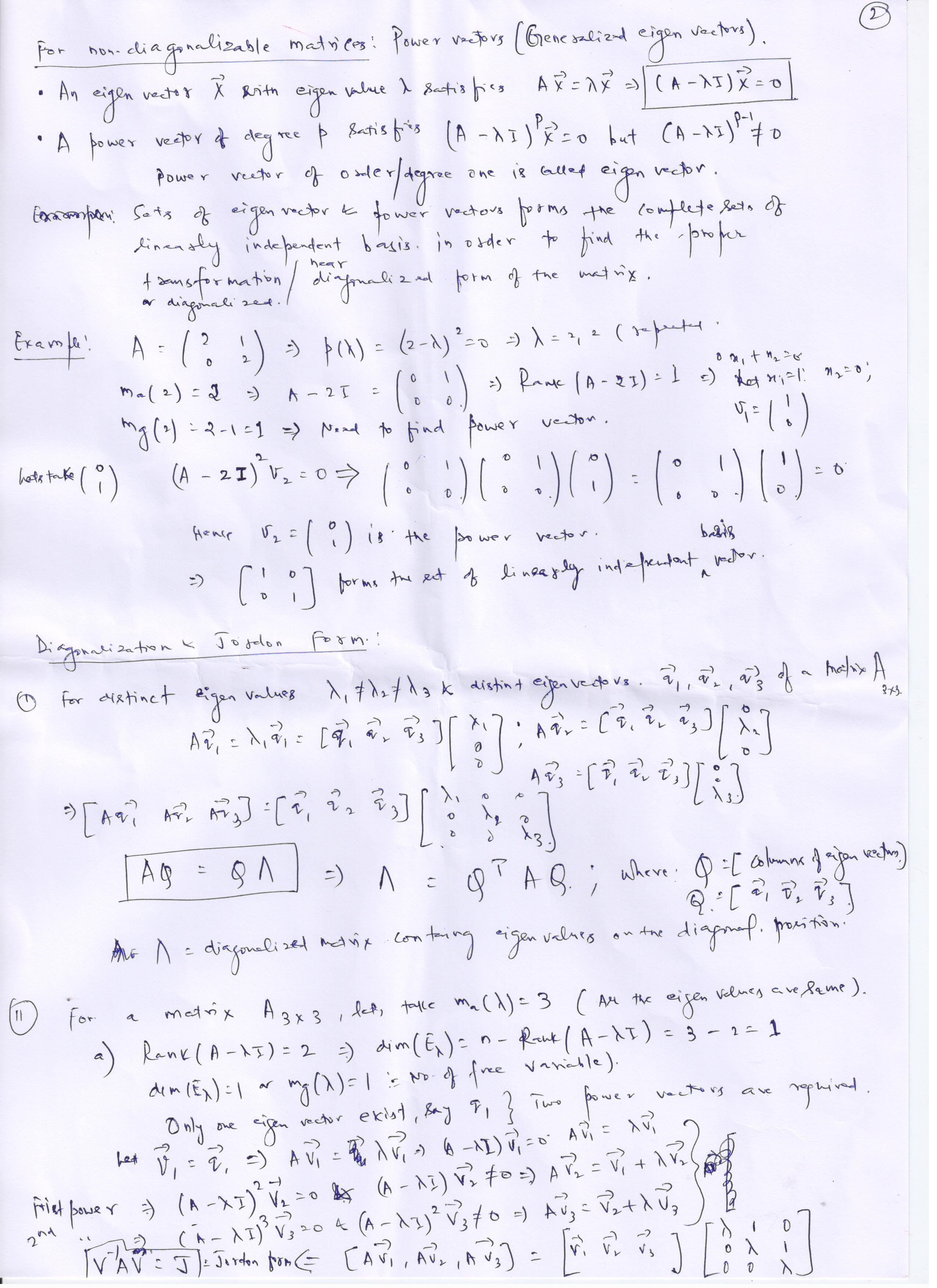
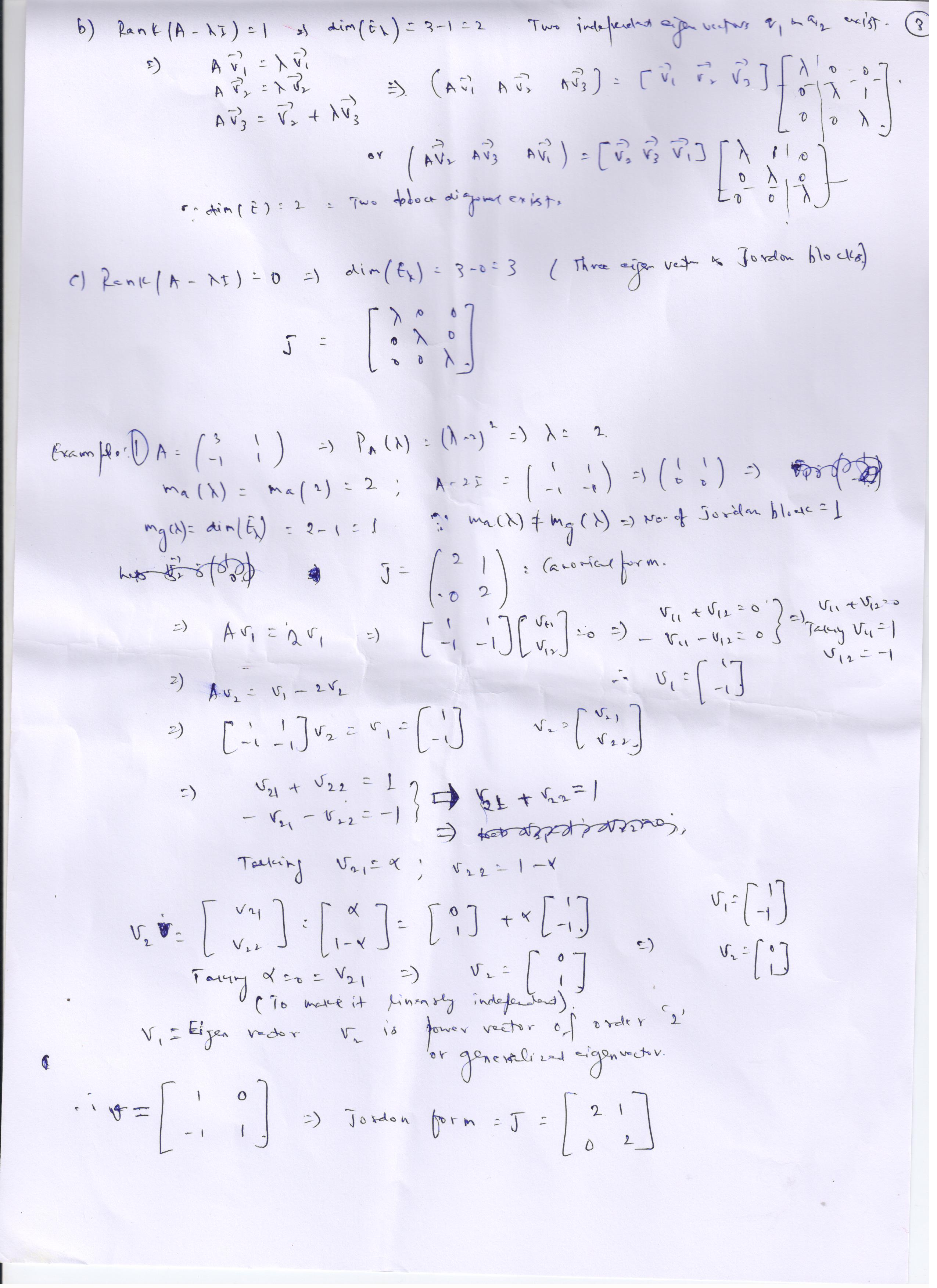
13. Linear Algebra- Diagonalization and Jordon Form Lecture 13.1, Lecture 13.2, Lecture 13.3, Lecture 13.4,
{kind=link}
{kind=link}
{kind=link}
{kind=link}
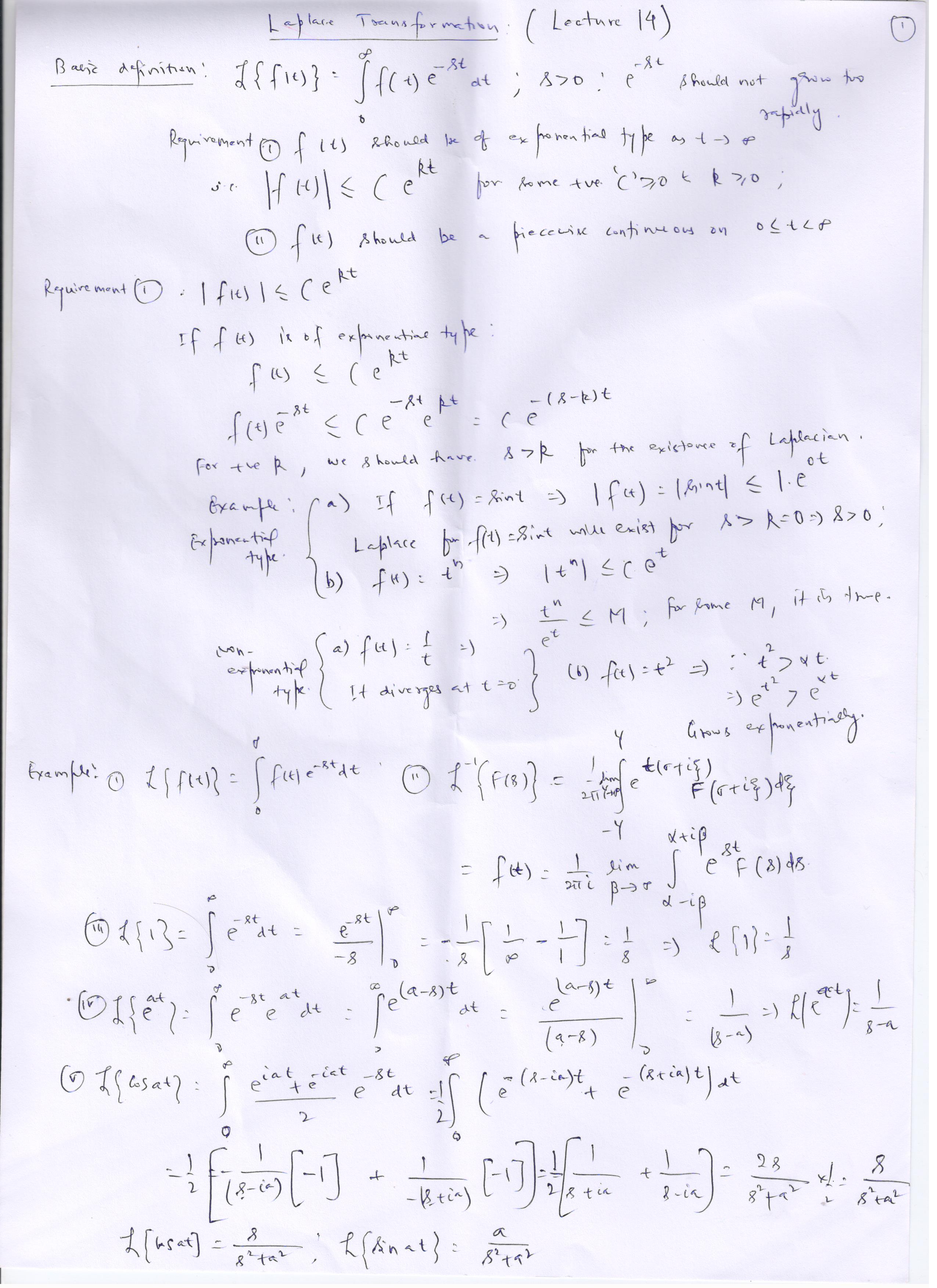
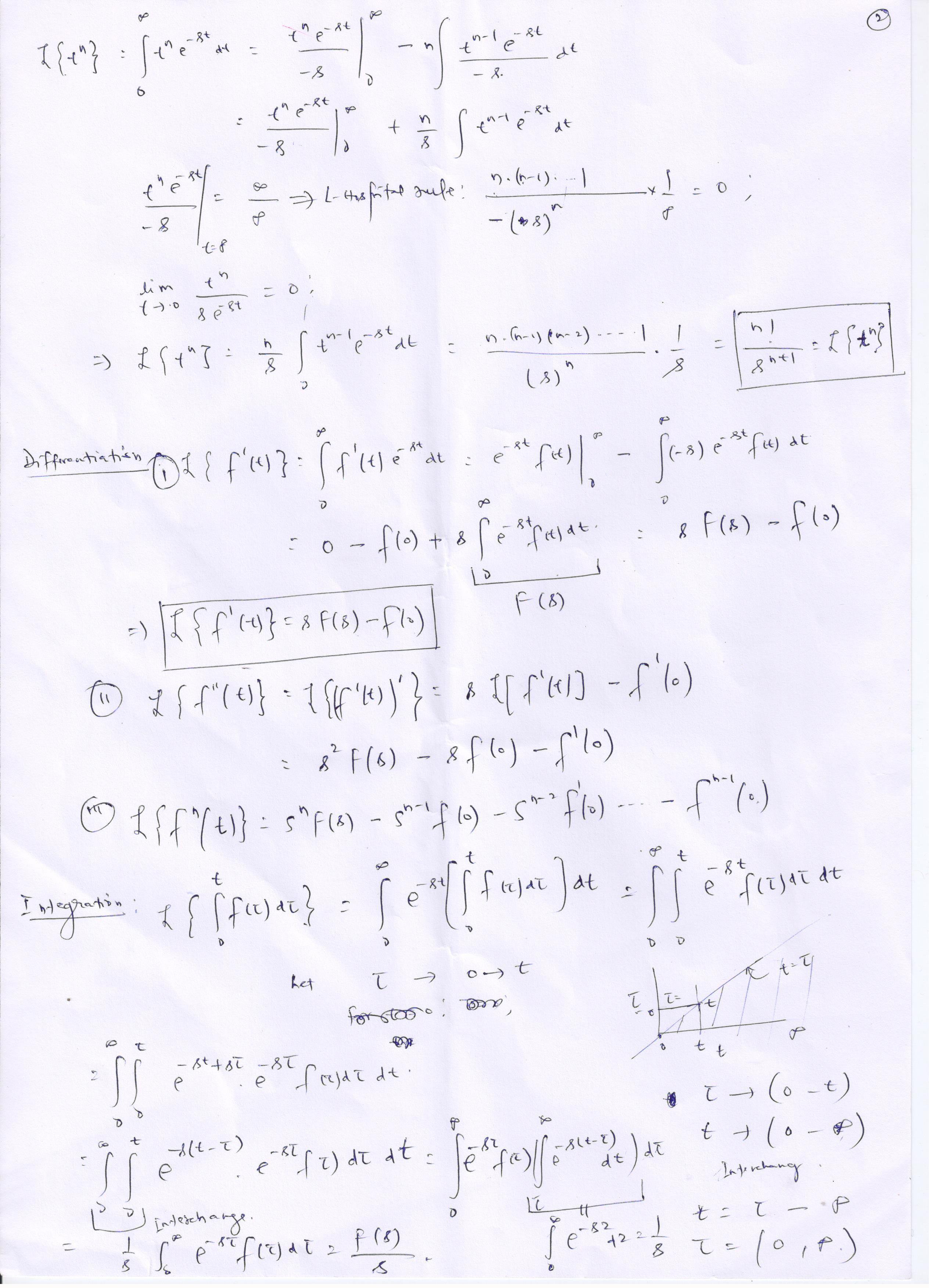
14. Laplace Transform - Introduction Lecture 14.1, Lecture 14.2, Lecture 14.3,
{kind=link}
{kind=link}
{kind=link}
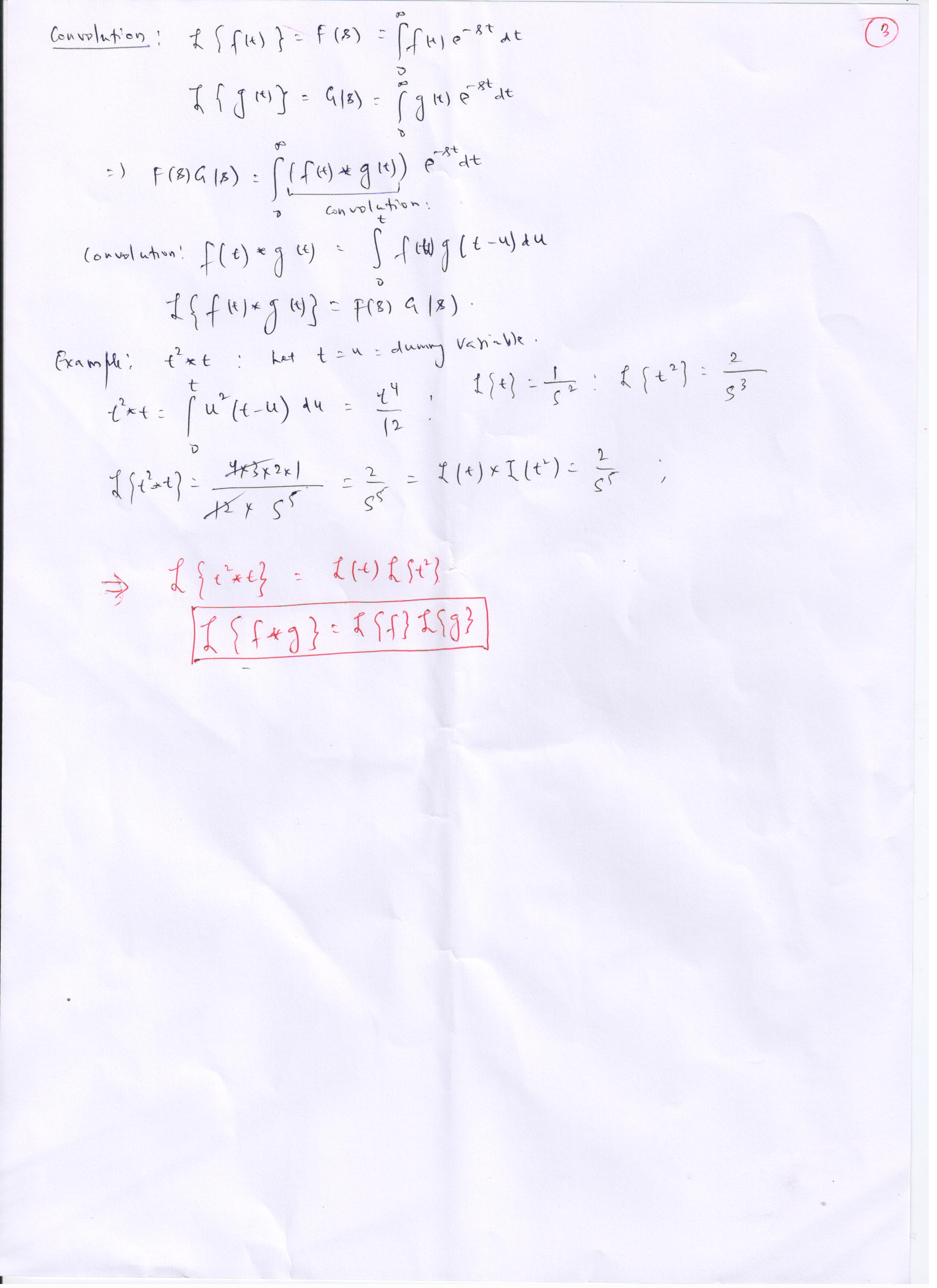
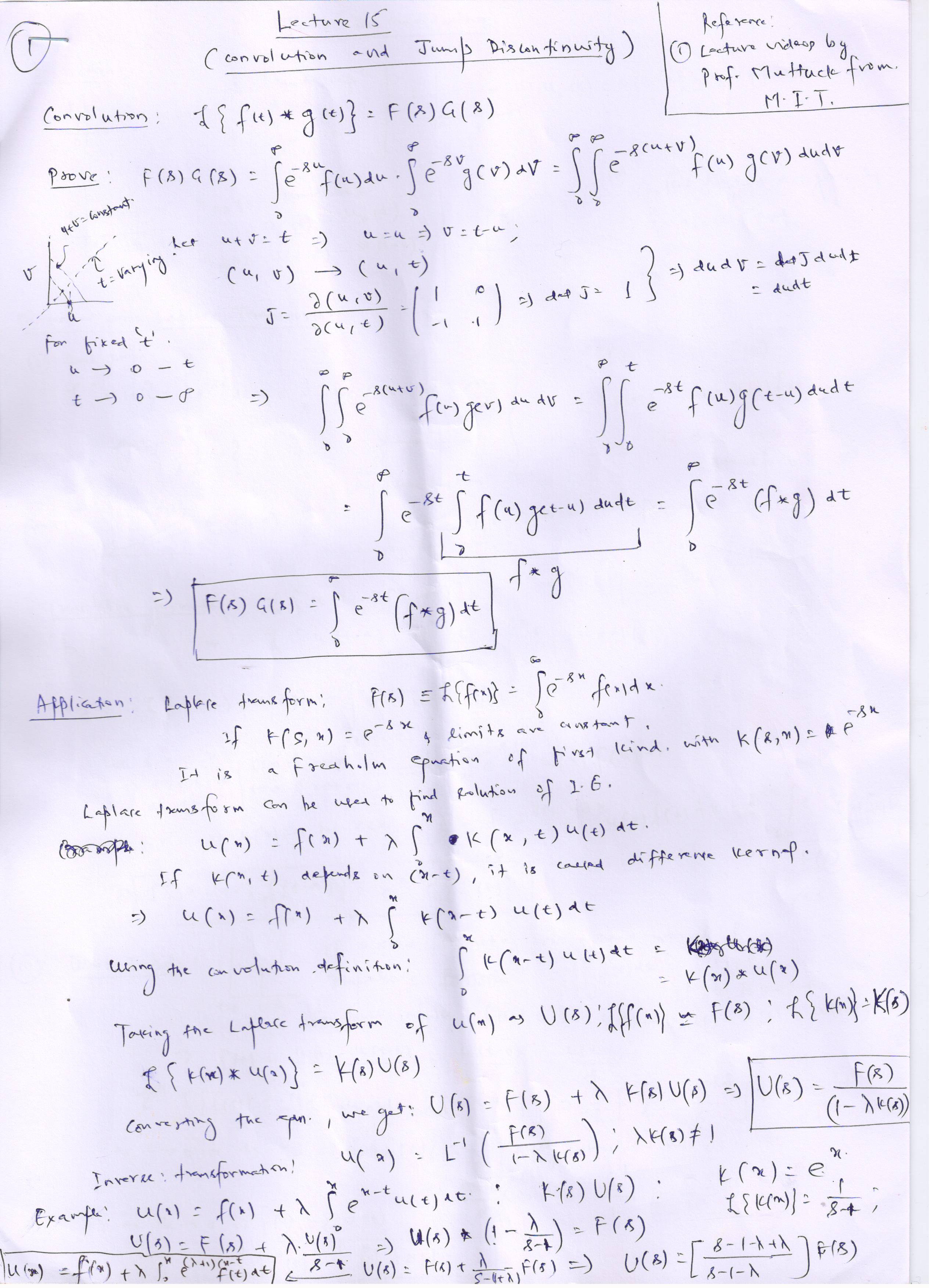
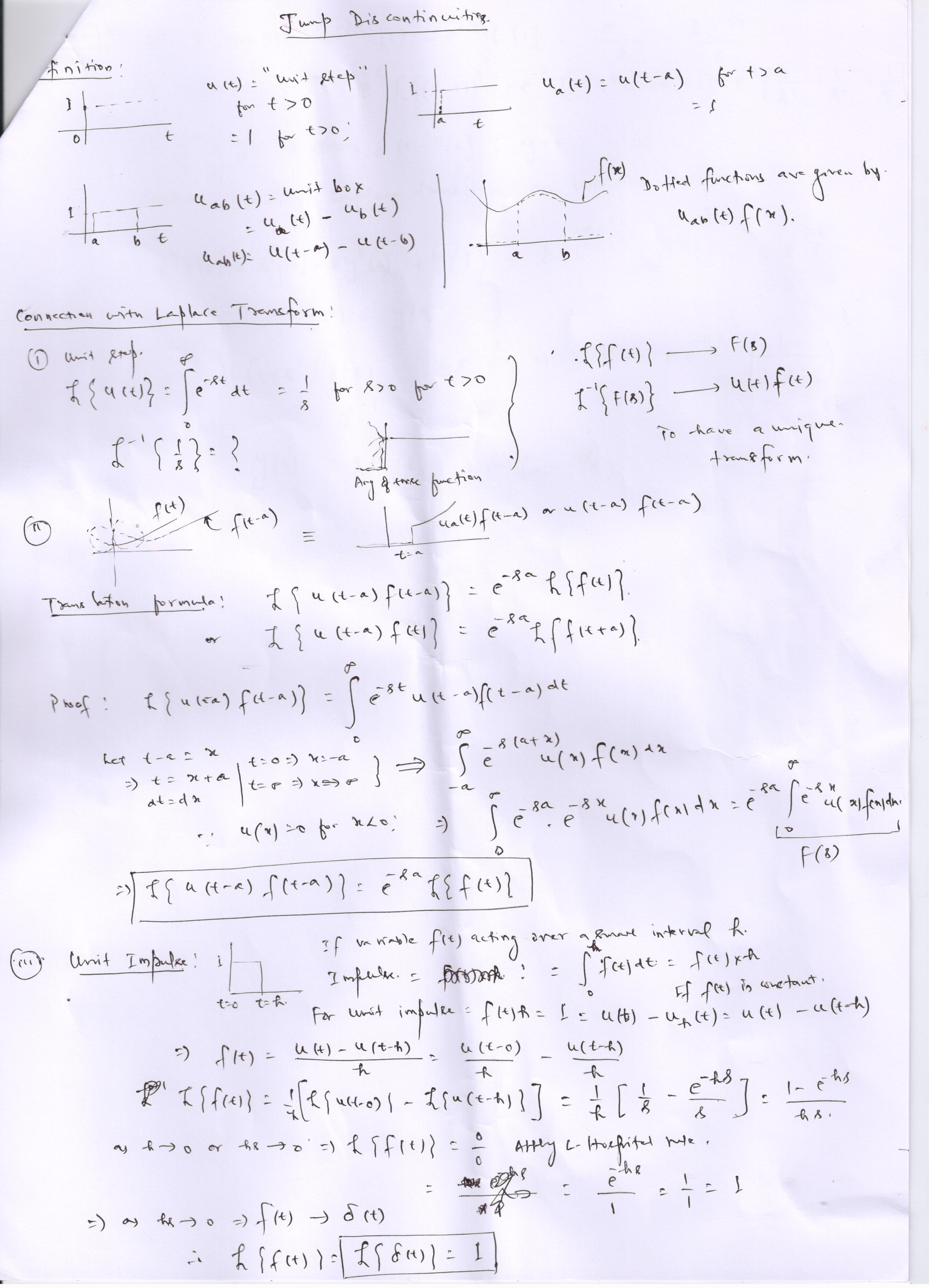
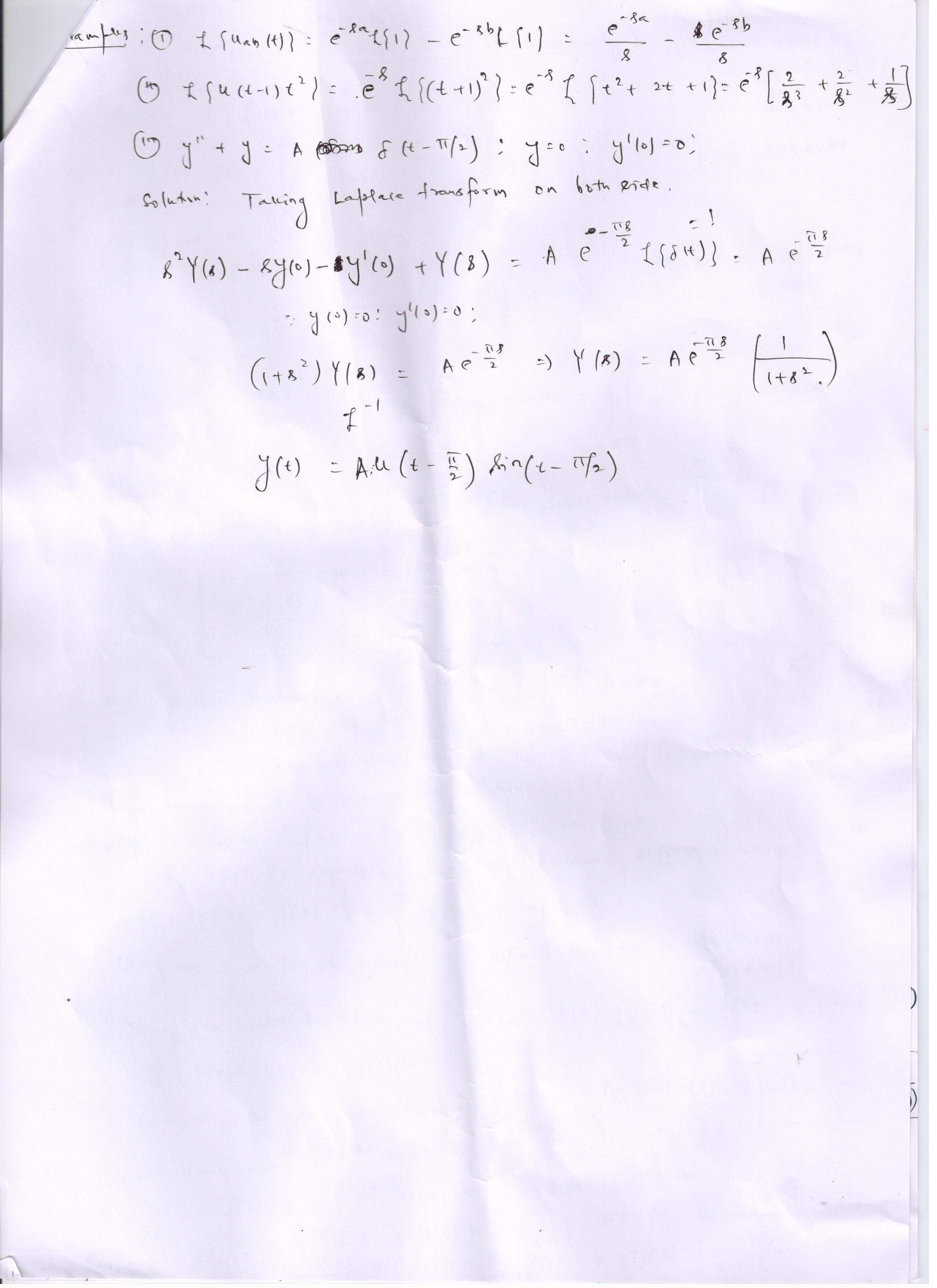
15. Laplace Transform - Convolution and Jump Discontinuity Lecture 15.1, Lecture 15.2, Lecture 15.3,
{kind=link}
{kind=link}
{kind=link}
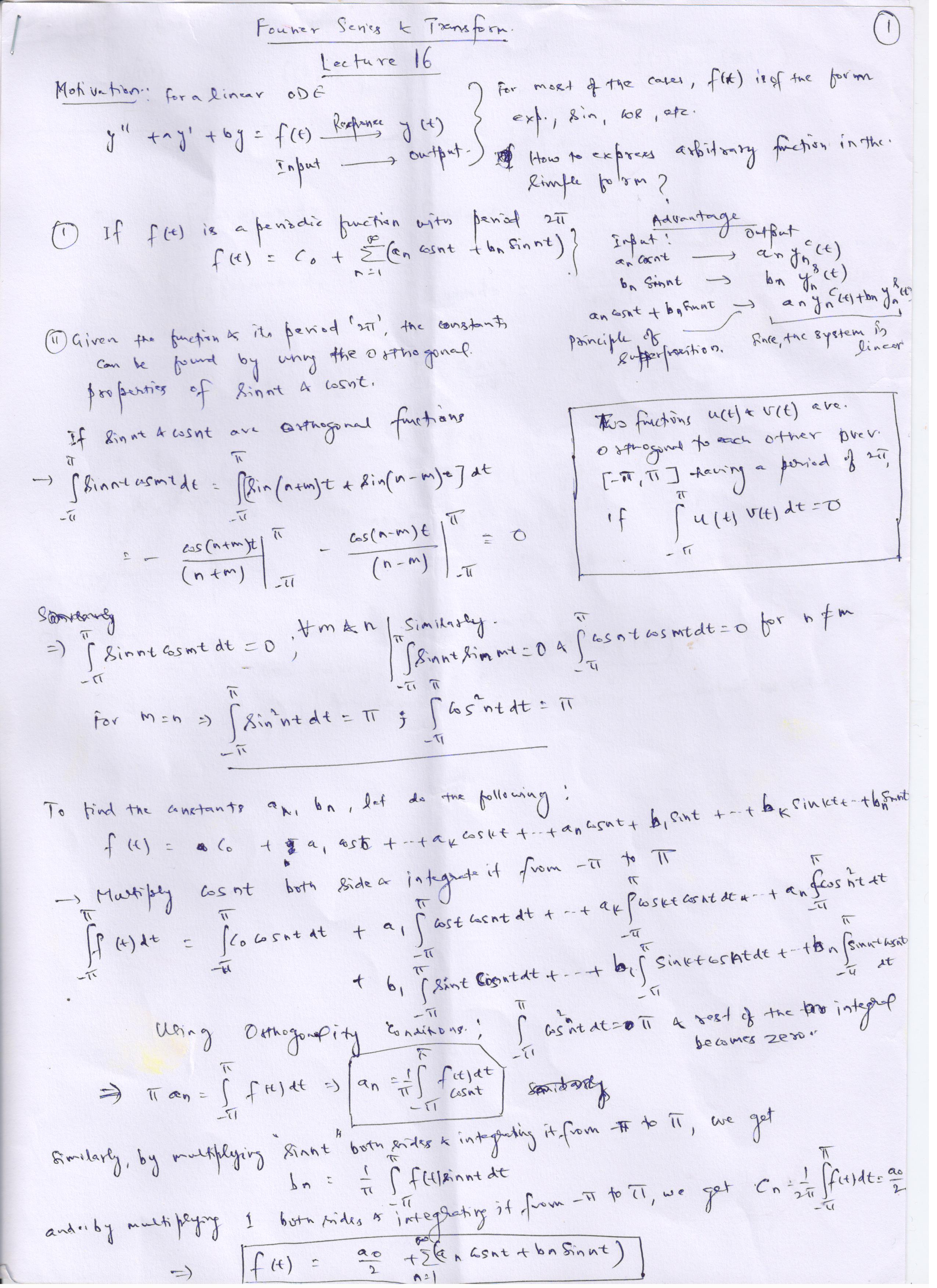
16. Fourier Series - Introduction Lecture 16.1, Lecture 16.2,
{kind=link}
{kind=link}
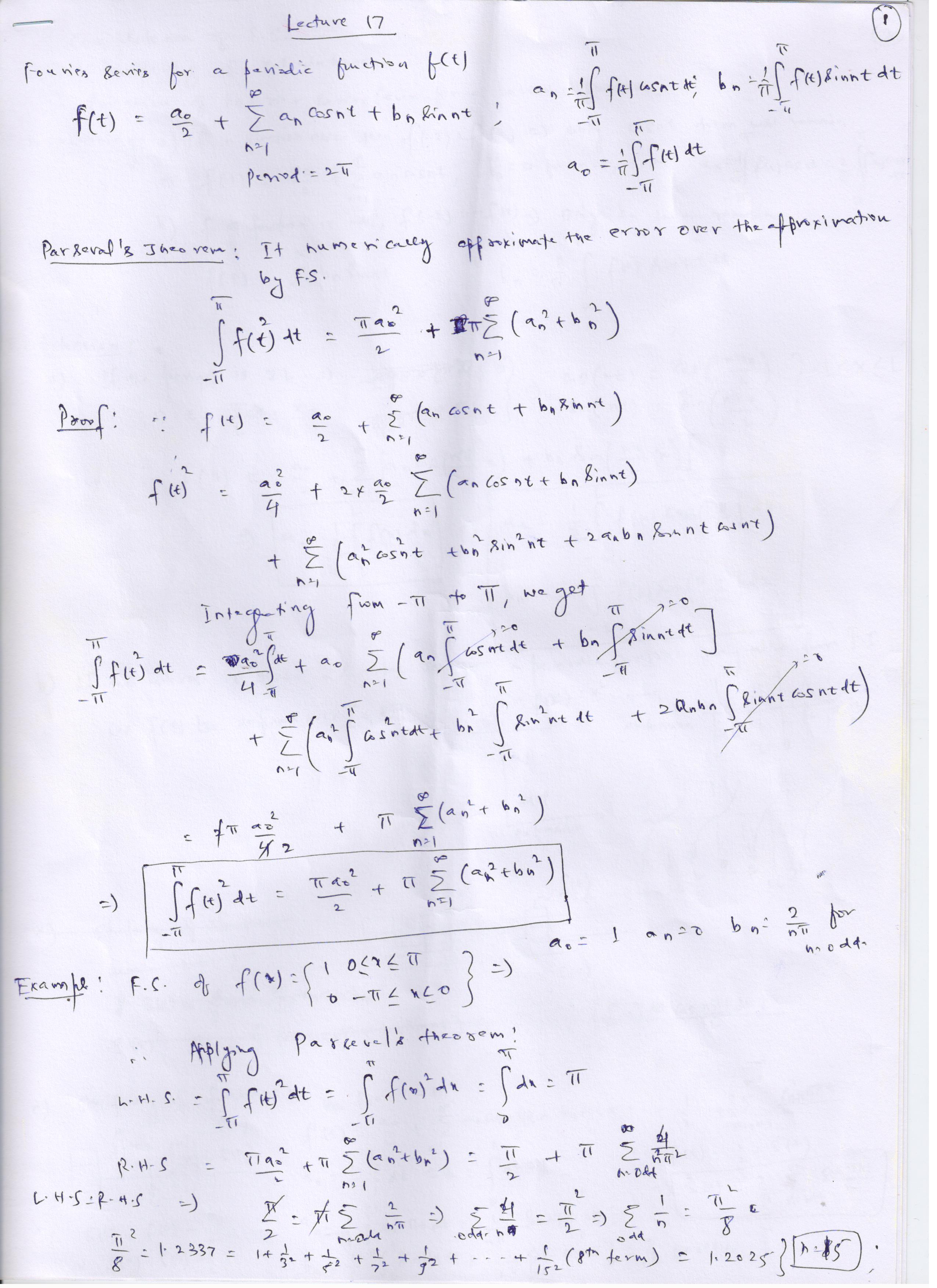
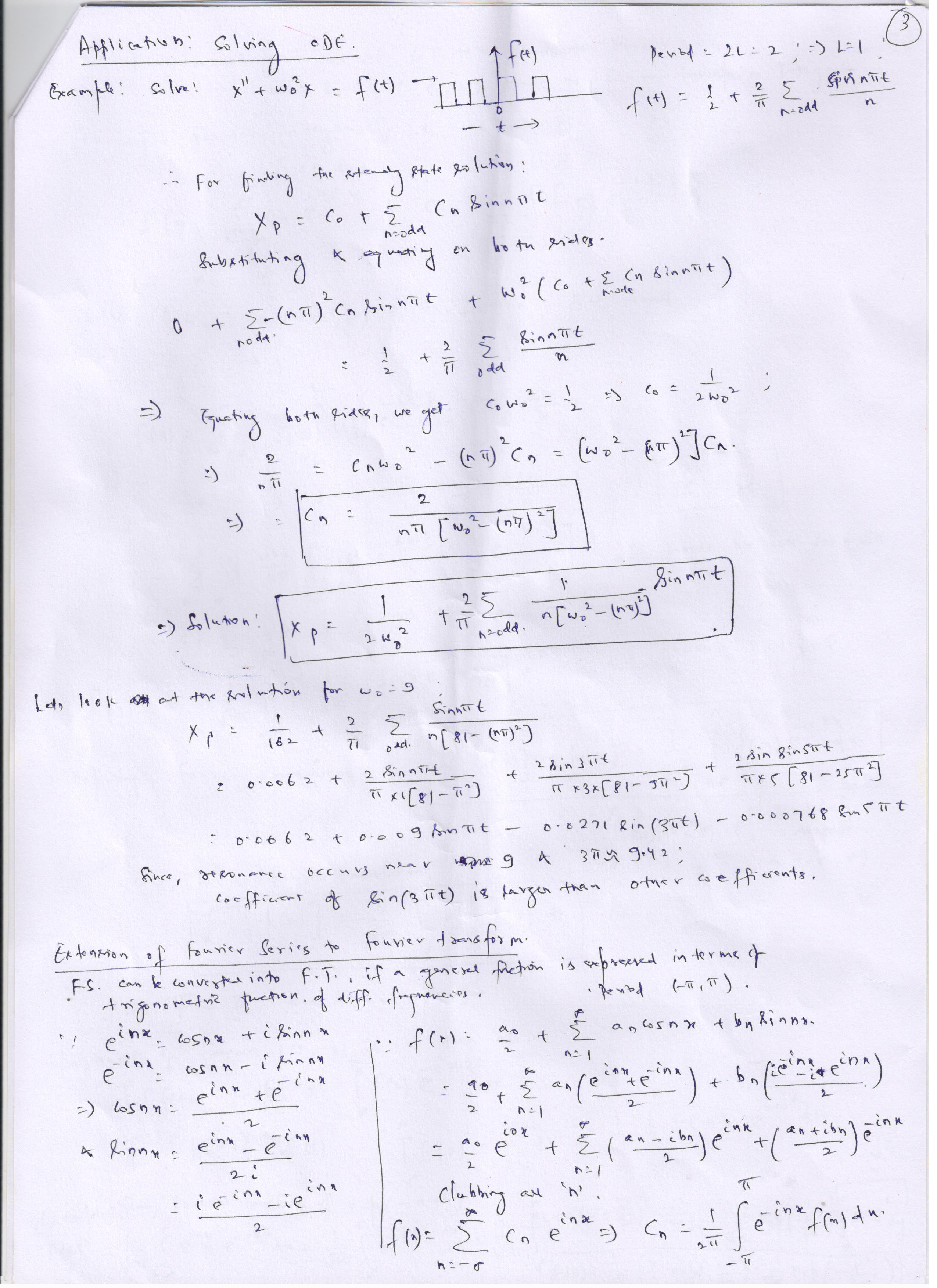
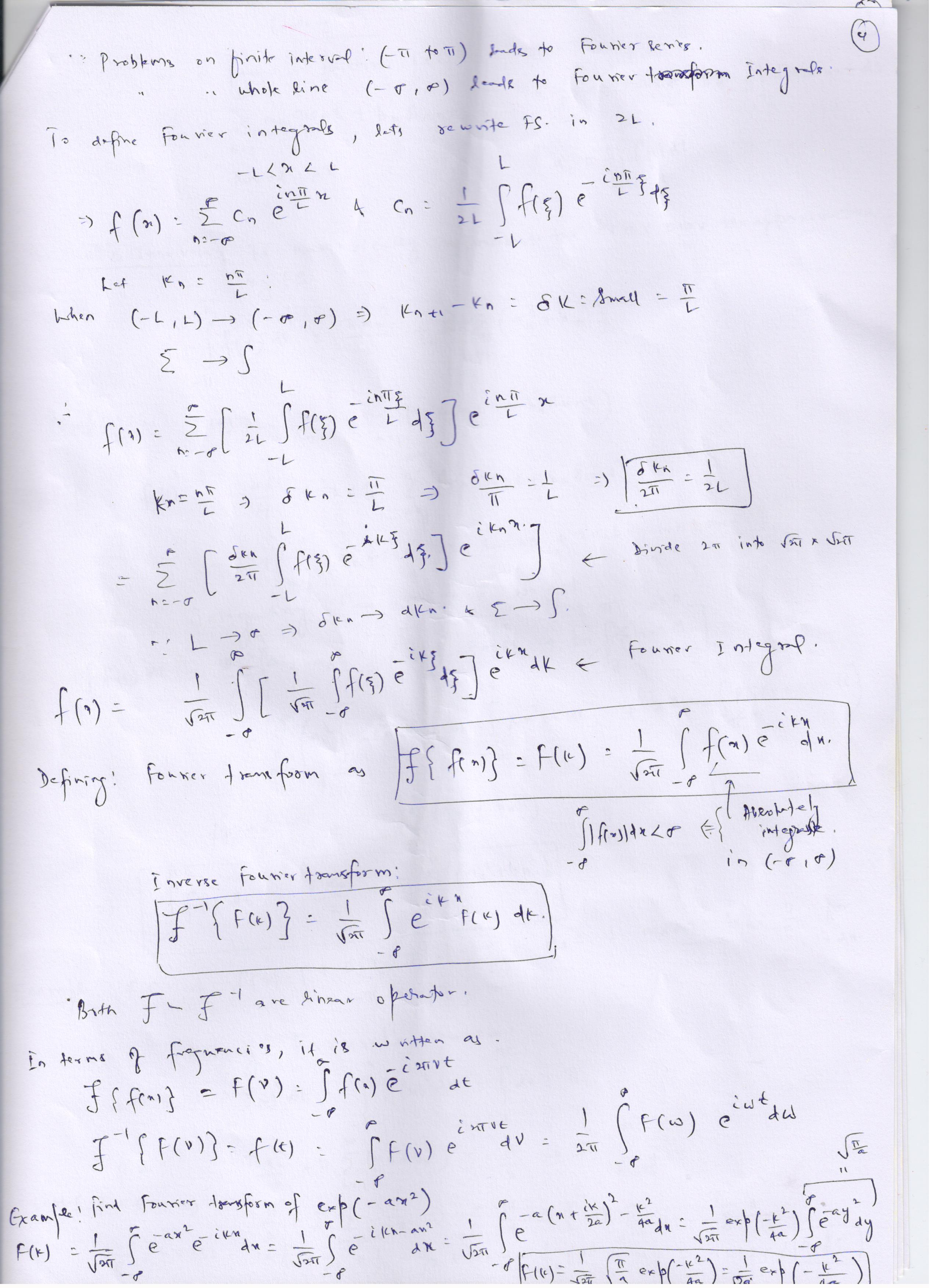
17. Parsevals Theorem and Fouries Transform Lecture 17.1, Lecture 17.2, Lecture 17.3, Lecture 17.4,
{kind=link}
{kind=link}
{kind=link}
{kind=link}
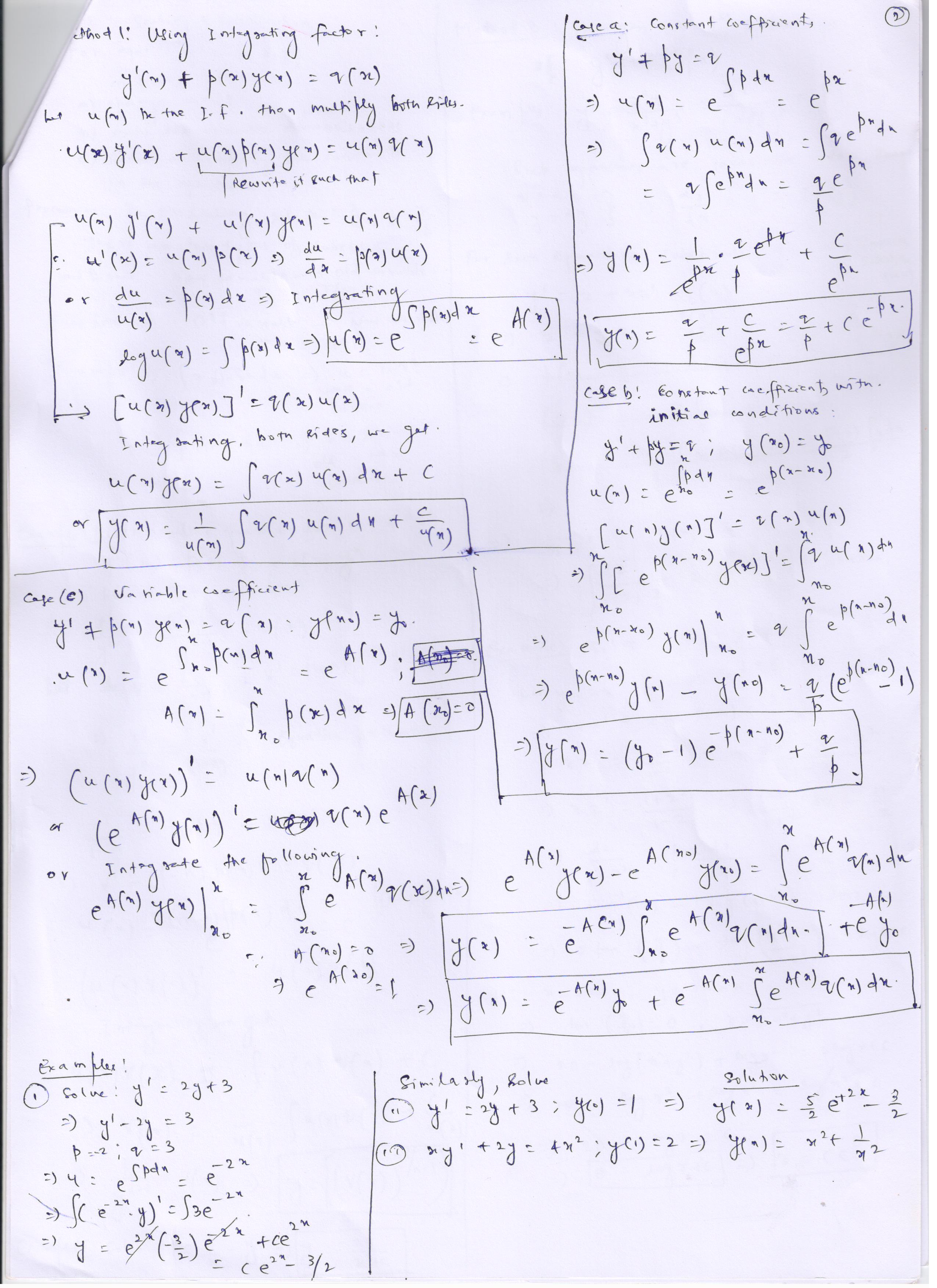
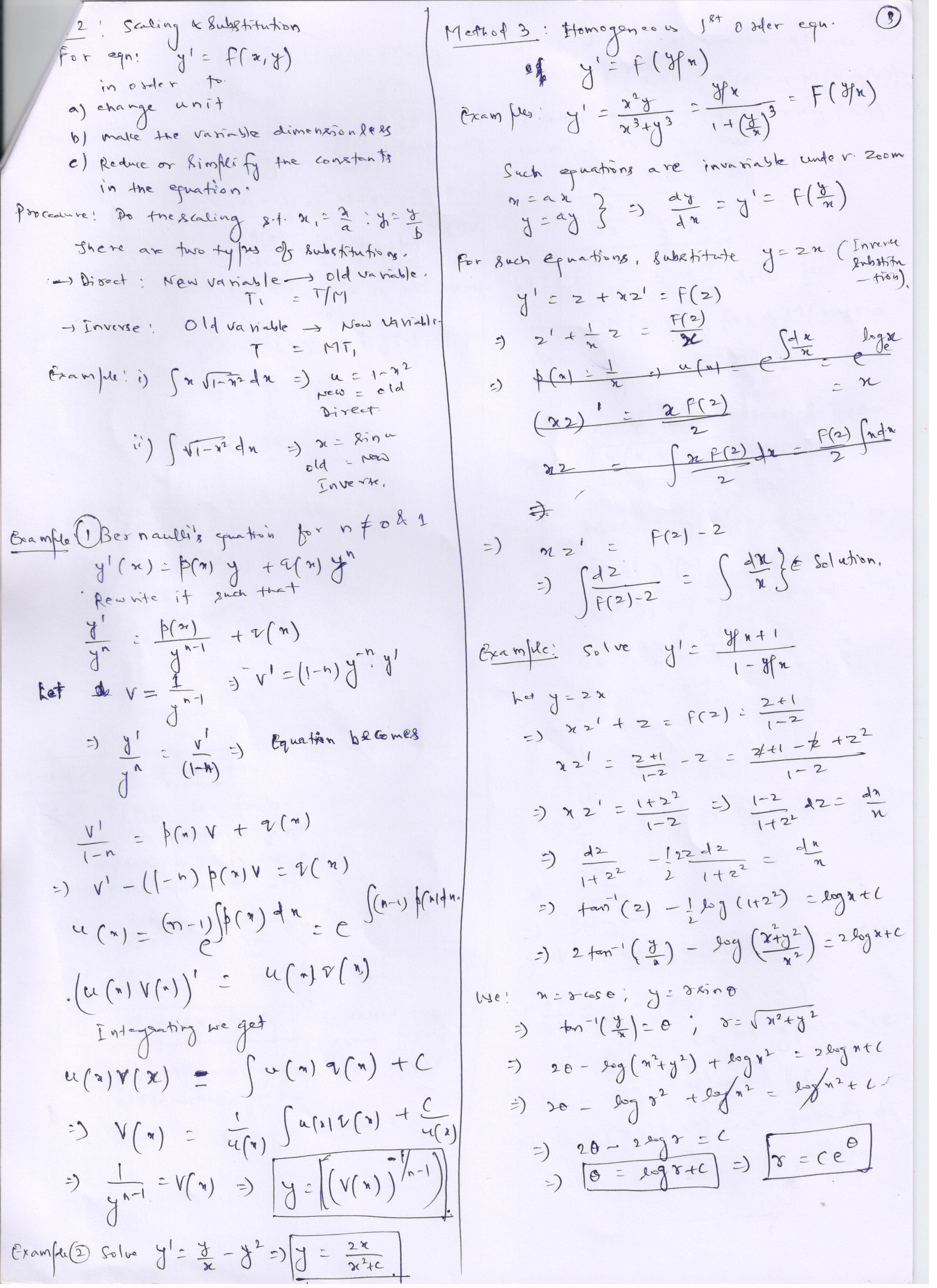
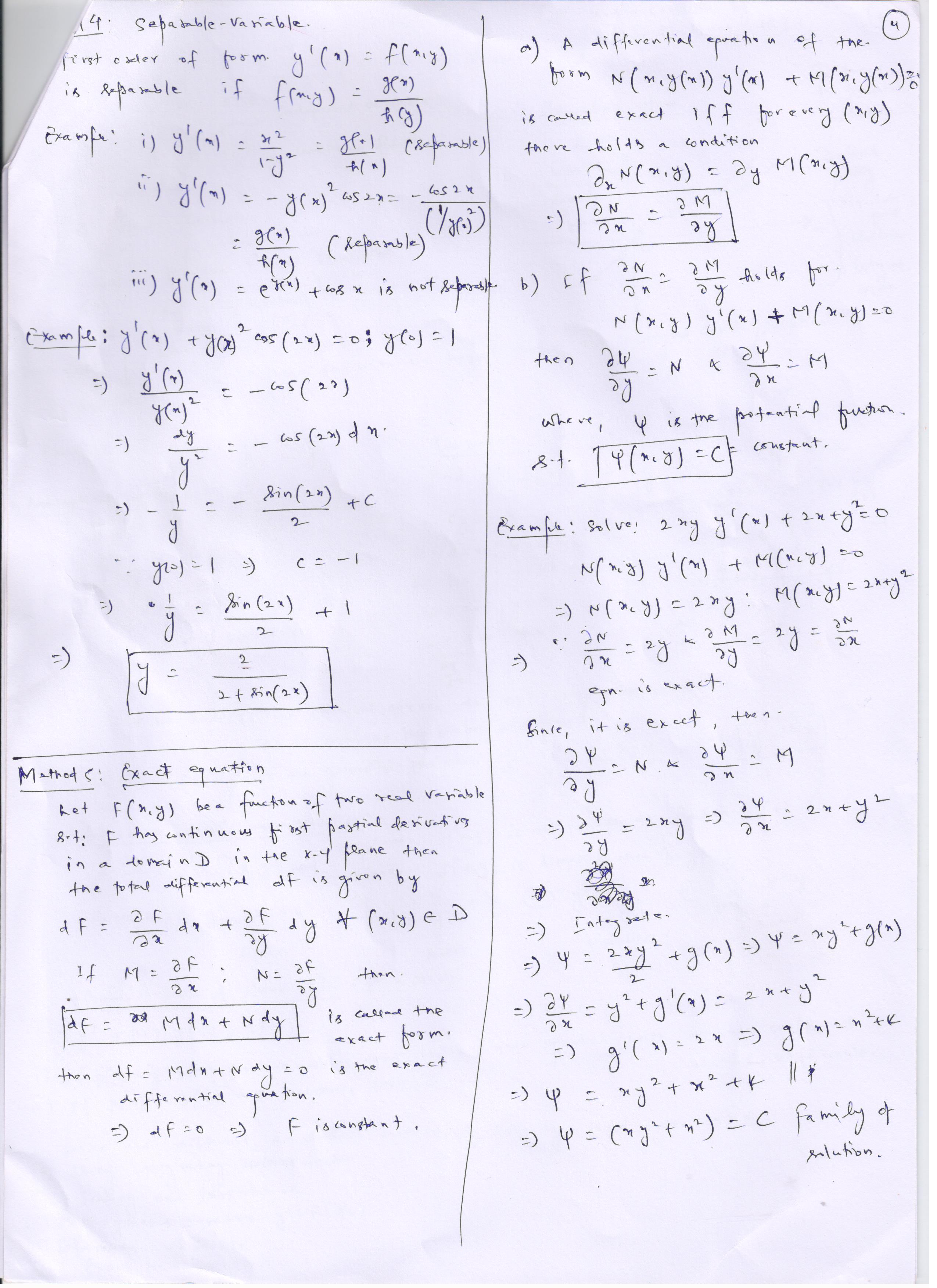
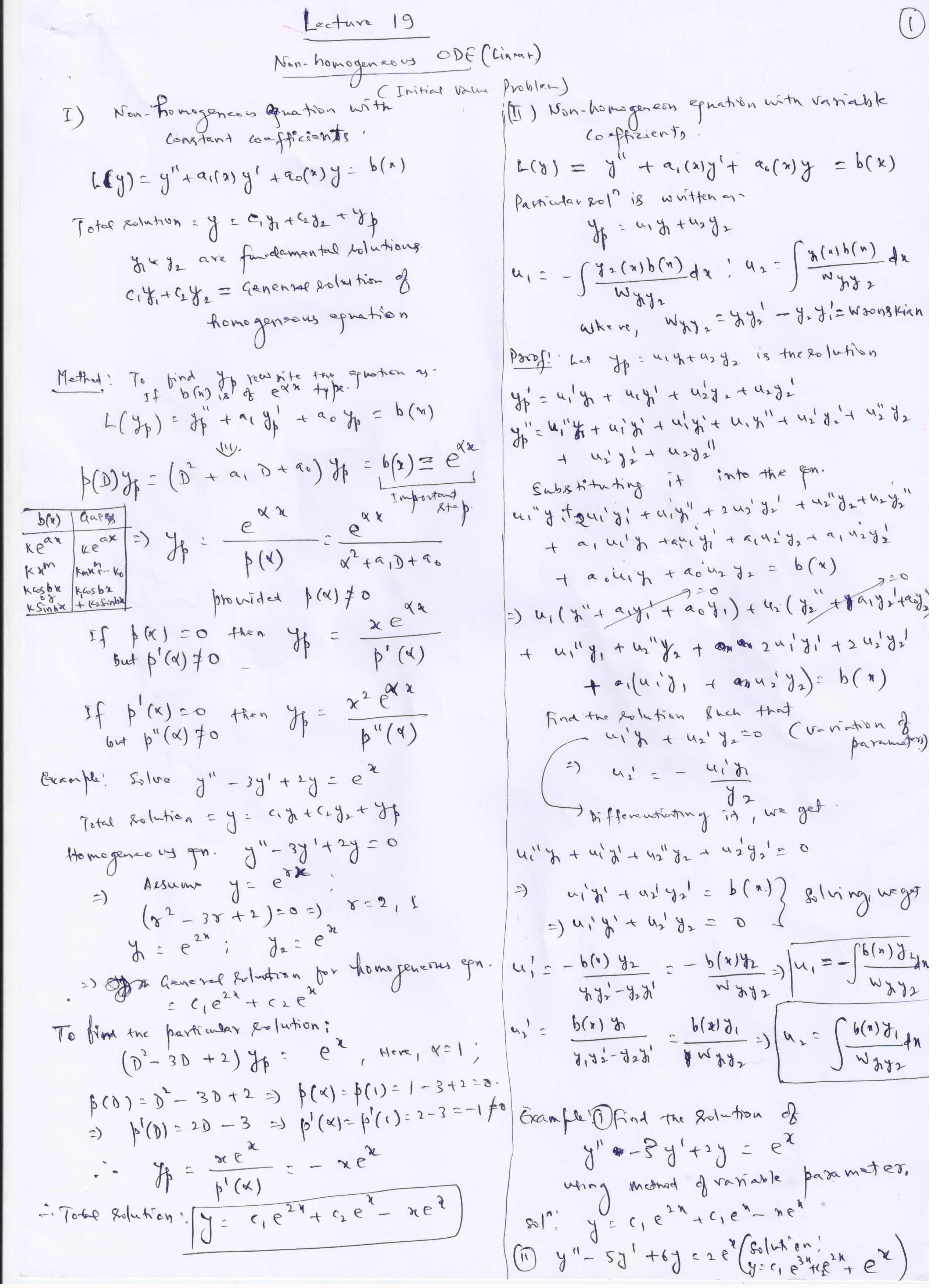
18. First and Second Order ODE Lecture 18.1, Lecture 18.2, Lecture 18.3, Lecture 18.4, Lecture 18.5, Lecture 18.6,
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
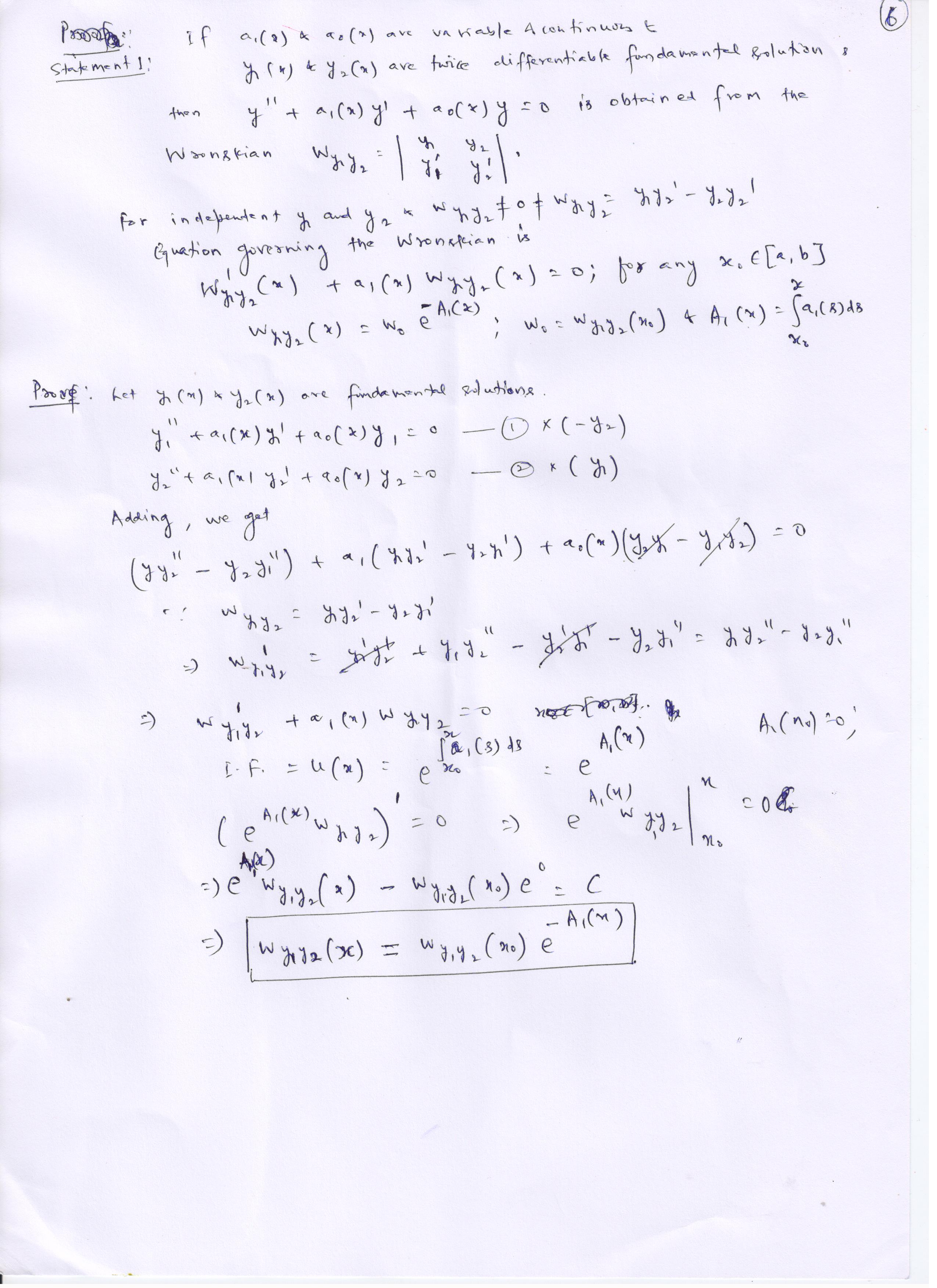
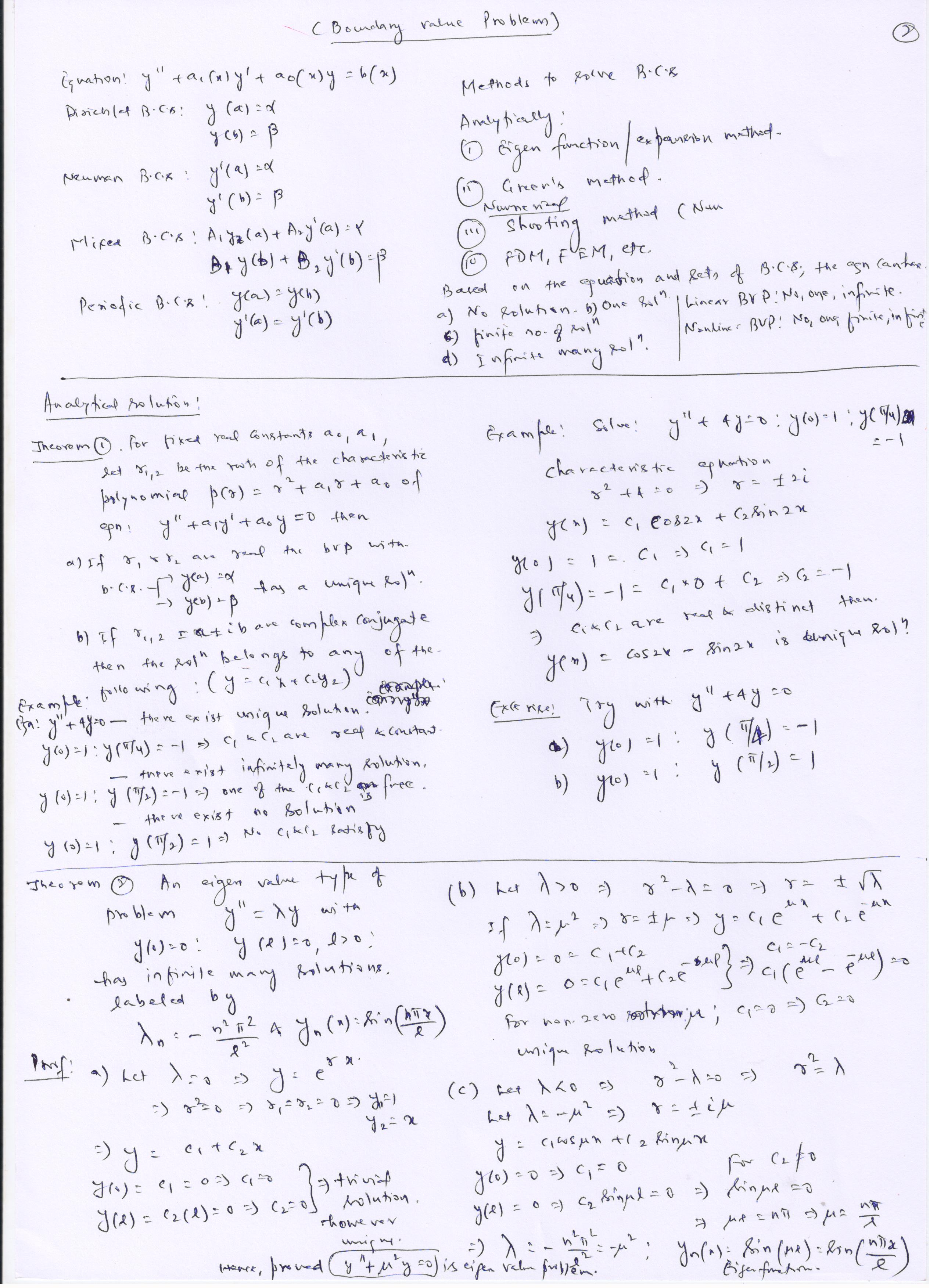
19. Solution to Second Order ODE Lecture 19.1, Lecture 19.2,
{kind=link}
{kind=link}
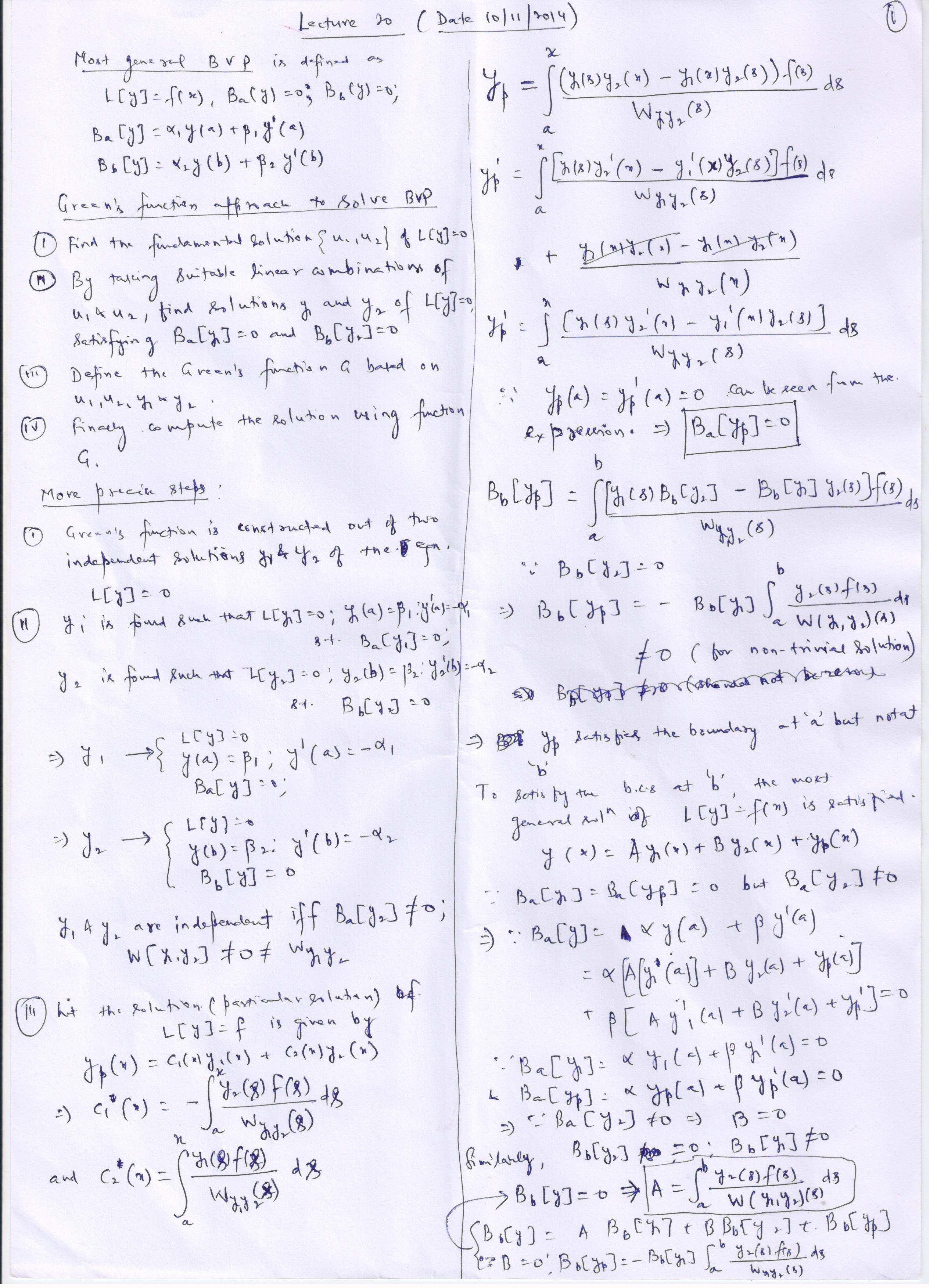
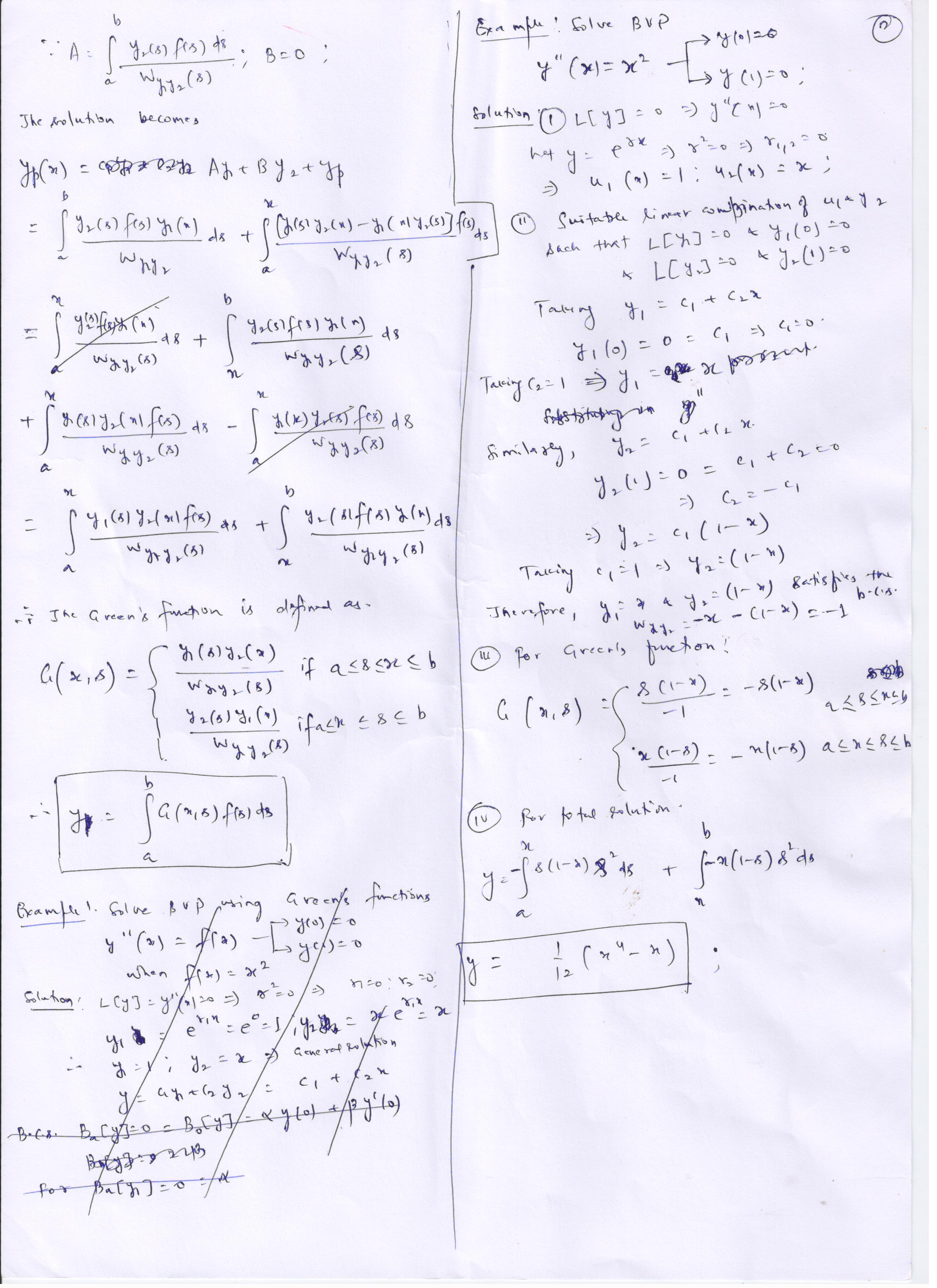
20. Green's Method, Shooting Method and Stability of Numerical Methods Lecture 20.1, Lecture 20.2, Lecture 20.3, Lecture 20.4,
{kind=link}
{kind=link}
{kind=link}
{kind=link}
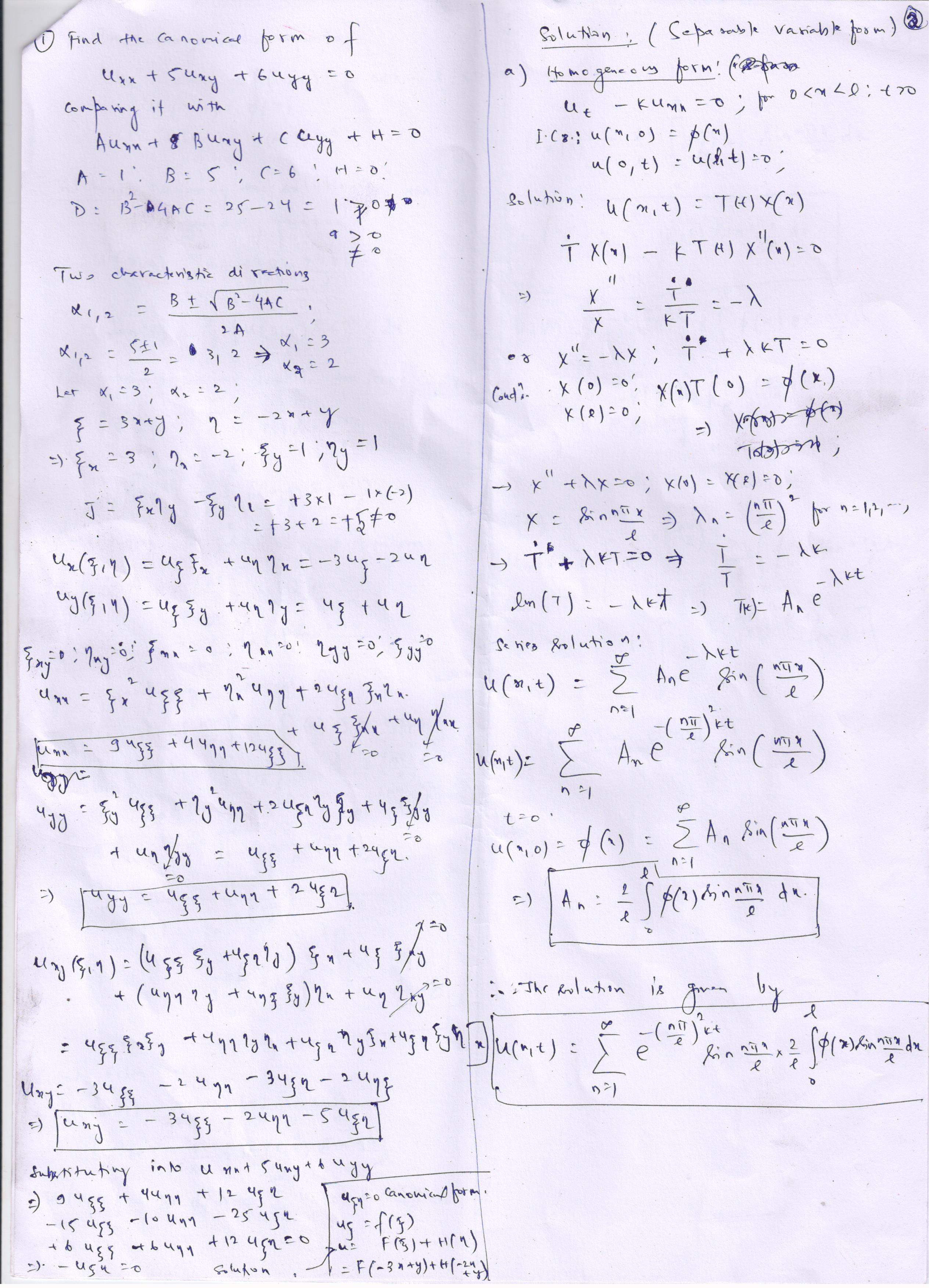
21. Partial Differential Equation:Classification, Canonical Form and Solution Method Lecture 21.1, Lecture 21.2, Lecture 21.3,
{kind=link}
{kind=link}
{kind=link}
END SEMESTER EXAMINATION is Scheduled on 18 Nov from 3 pm to 6pm in Room No. LH-1(008): Question Paper, Solution 1, Solution 2, Solution 3, Solution 4, Solution 5, Solution 6,
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
ME3210: Intrumentations (Jan-Feb -2015)
Introduction to measurements, various principles of measurements, errors in measurement, basic statistics, calibration procedures, displacement measurement, measurement of temperature, measurement of pressure, measurement of fluid flow, obstruction meters, measurement of fluid velocities, thermal anemometry, strain gauges, measurement of force, torque and power, load cells, torque cells, dynamometers, vibration measurement, velocity and acceleration measurement. .
0. Course content and references Lecture 0.1
{kind=link}
1. Classification and computation of errors Lecture 1.1 , Lecture 1.2 , Lecture 1.3 , Lecture 1.4 ,
2. Analog and Discrete Signal Analysis Lecture 2.1 , Lecture 2.2 ,
3. Fourier Transform and Discrete Fourier Transform Lecture 3.1 , Lecture 3.2 ,
4. Digital Signal and Circuit Lecture 4.1 , Lecture 4.2 ,
5. Signal Conditioning Lecture 5.1 , Lecture 5.2 ,
6. Signal Conditioning (Cont...) Lecture 6.1 , Lecture 6.2 ,
7. Fliter- Low and High Pass (Cont...) Lecture 7.1 , Lecture 7.2 ,
8. Response of Measuring Systems Lecture 8.1 , Lecture 8.2 , Lecture 8.3 , Lecture 8.4 ,
9. Application: Strain gages Lecture 9.1 , Lecture 9.2 , Lecture 9.3 , Lecture 9.4 , Lecture 9.5 , Lecture 9.6 ,
10. Application: Temperature measurement Lecture 10.1 , Lecture 10.2 , Lecture 10.3 , Lecture 10.4 , Lecture 10.5 , Lecture 10.6 ,
11. Application: Pressure measurement Lecture 11.1 , Lecture 11.2 , Lecture 11.3 , Lecture 11.4 ,
12. Application: Displacement measurement Lecture 12.1 , Lecture 12.2 , Lecture 12.3 , Lecture 12.4 ,
13. Application: Force measurement Lecture 13.1 , Lecture 13.2 , Lecture 13.3 ,
ME3130: Elements of Machine Design (Aug-Nov -2010)
Design consideration-limits, fits, tolerances and standardization, a brief introduction to strength of materials, modes of failure, failure theories. Design of shafts under static and fatigue loadings. Design of springs - helical, compression, tension, torsional and leaf springs. Design of joints - threaded fasteners, preloaded bolt joints, welded and glued joints. Design and analysis of sliding and rolling contact bearings. Analysis and applications of power screws and couplings. Analysis of clutches and brakes. Design of belt and chain drives. Design of spur, helical, bevel and worm gears.
ME3090: Design of Transmission Elements, (Aug-Nov 2021)
Analysis and applications of power screws and couplings, analysis of clutches and brakes, design of belt and chain drives, design of spur and helical gears, design and analysis of rolling and sliding bearings. .
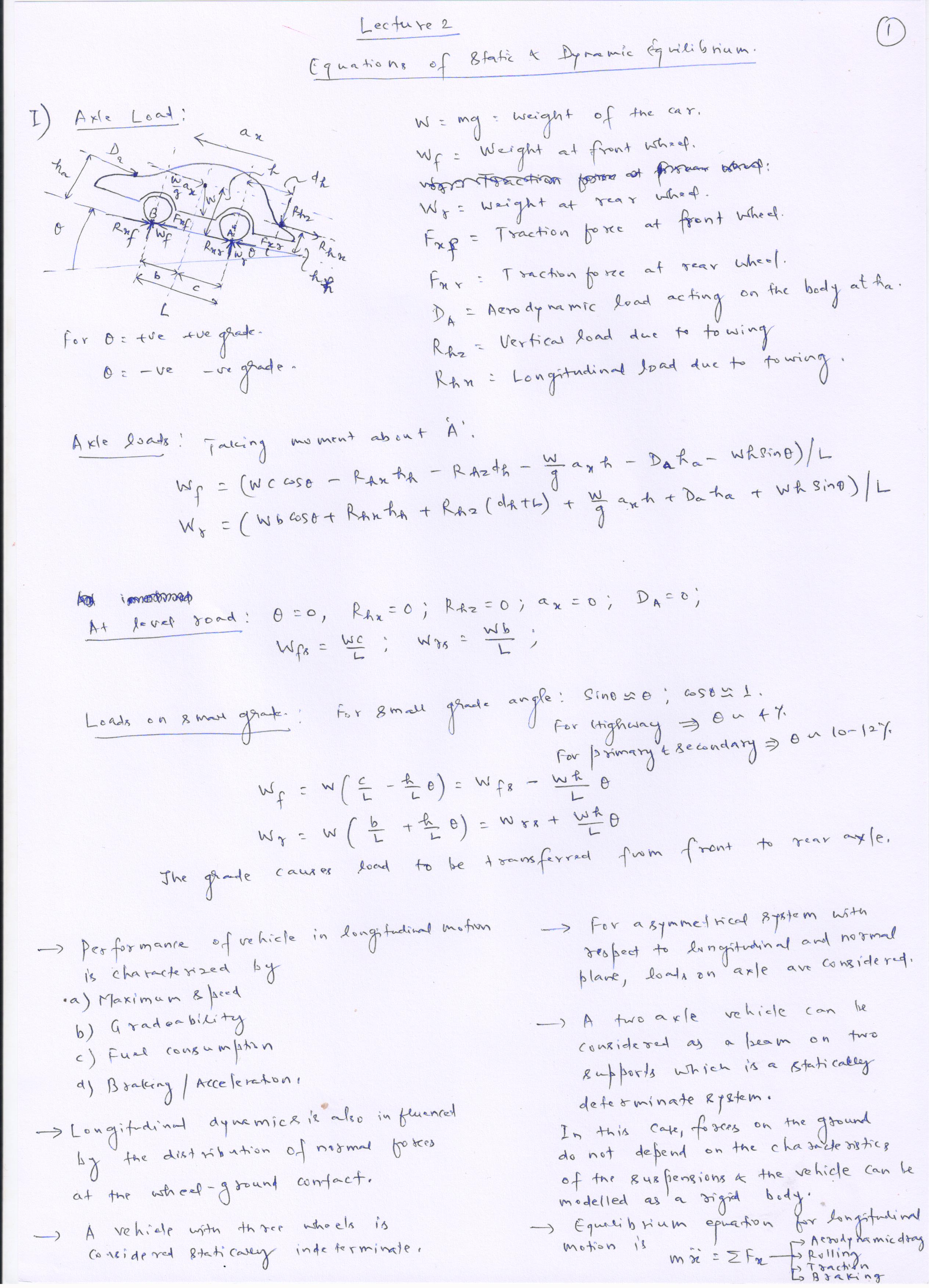
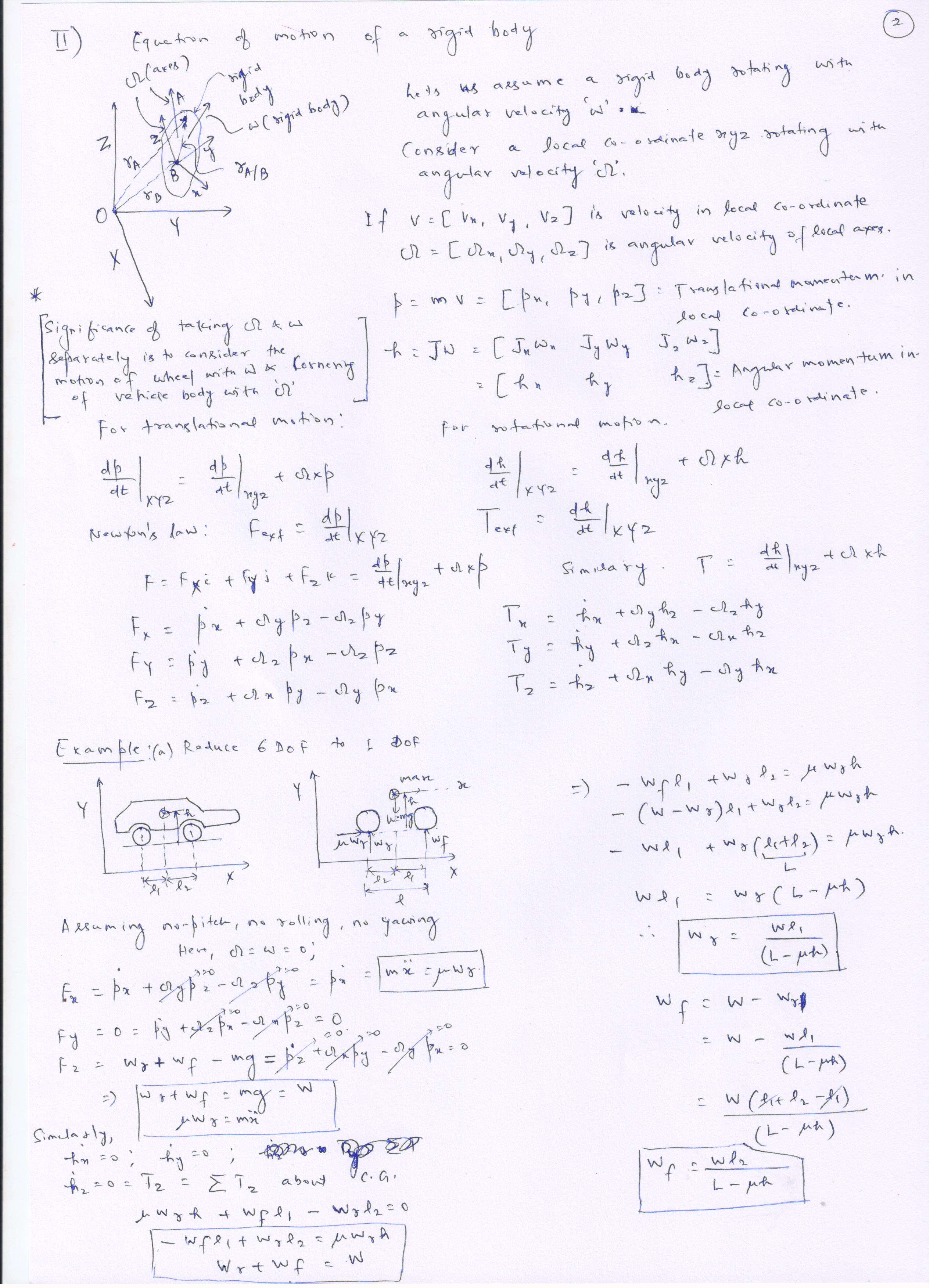
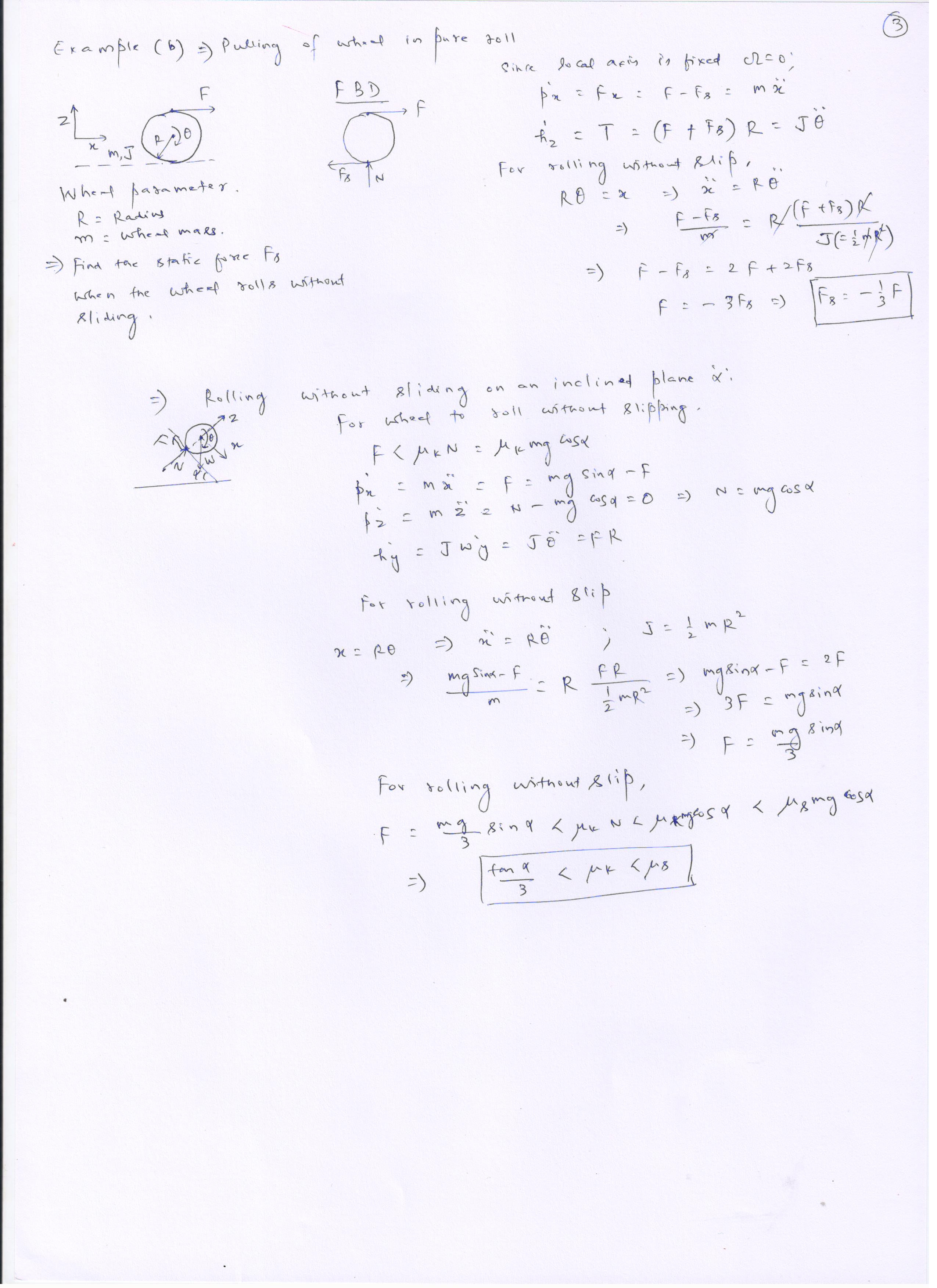
ME5670: Vehicle Dynamics -(Jan-Apr -2014, 2015, 2016, 2017, 2018, 2019, 2020)
Vehicle Mechanics: Forces under static and dynamic equilibrium. Free body diagram of different vehicle components such as tire, braking, suspension, chassis, car body, gear box, clutch system, power steering, chassis, car body. Simple linearized rigid models of different components. Dynamic stability and the vehicle performance under different operating conditions such as understeering, neutralsteering, oversteering, and factors associated with the vehicle-terrain interaction. Concept of vehicle ride comfort. Introduction to random excitation and electronics stability controls. Performance characteristics of a comfort vehicle ride. Introduction to the development of one-dimensional vehicle driveline using different softwares such as MATLAB Simulink/MAPLESIM/System Modeller. Introduction to advanced topics in the accurate modelling of vehicle dynamics: Nonlinear models considering large deformation and material nonlinearity.
0. Introduction and Course Content (01/01/2016) Lecture 0.1 ,
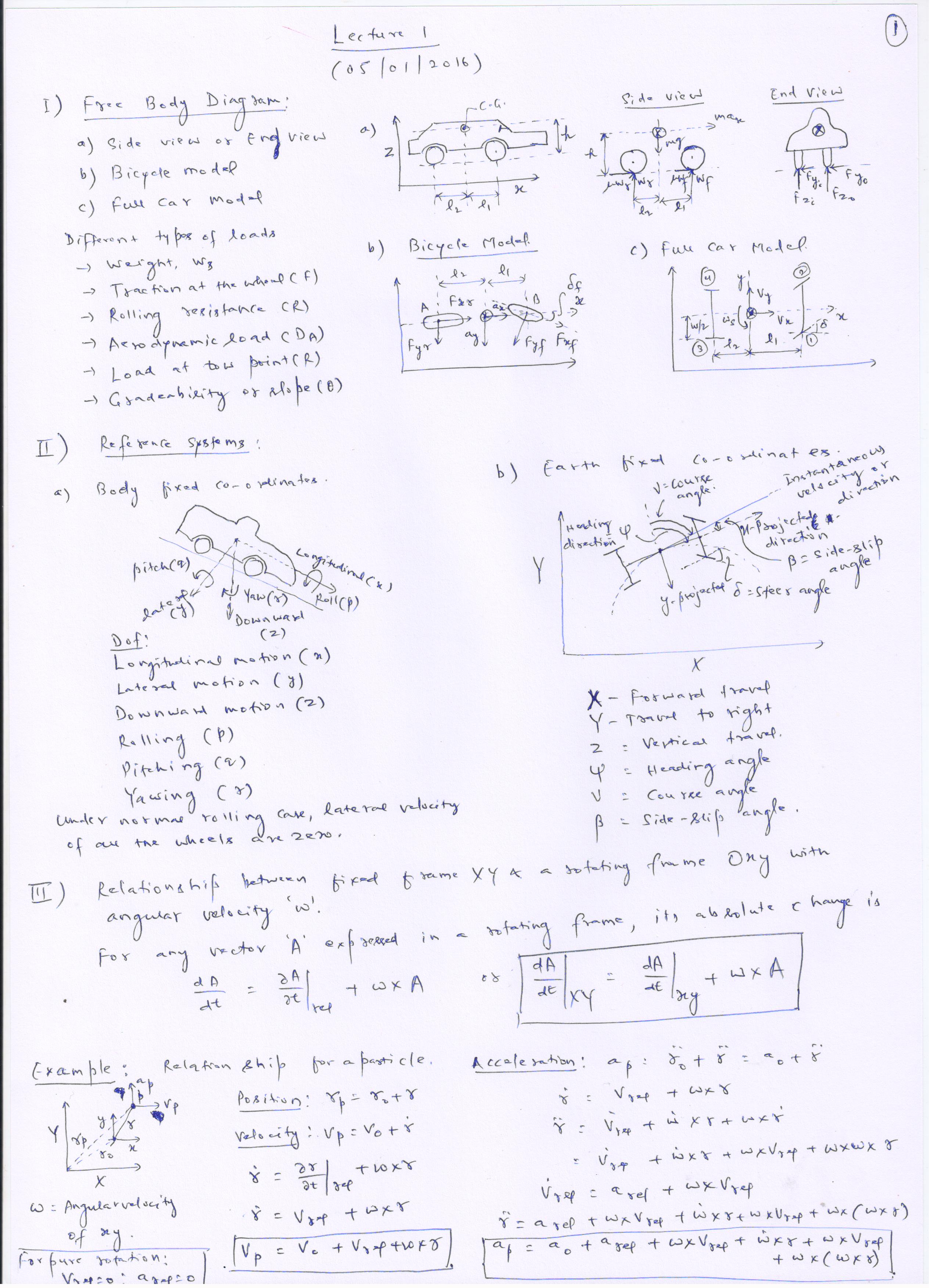
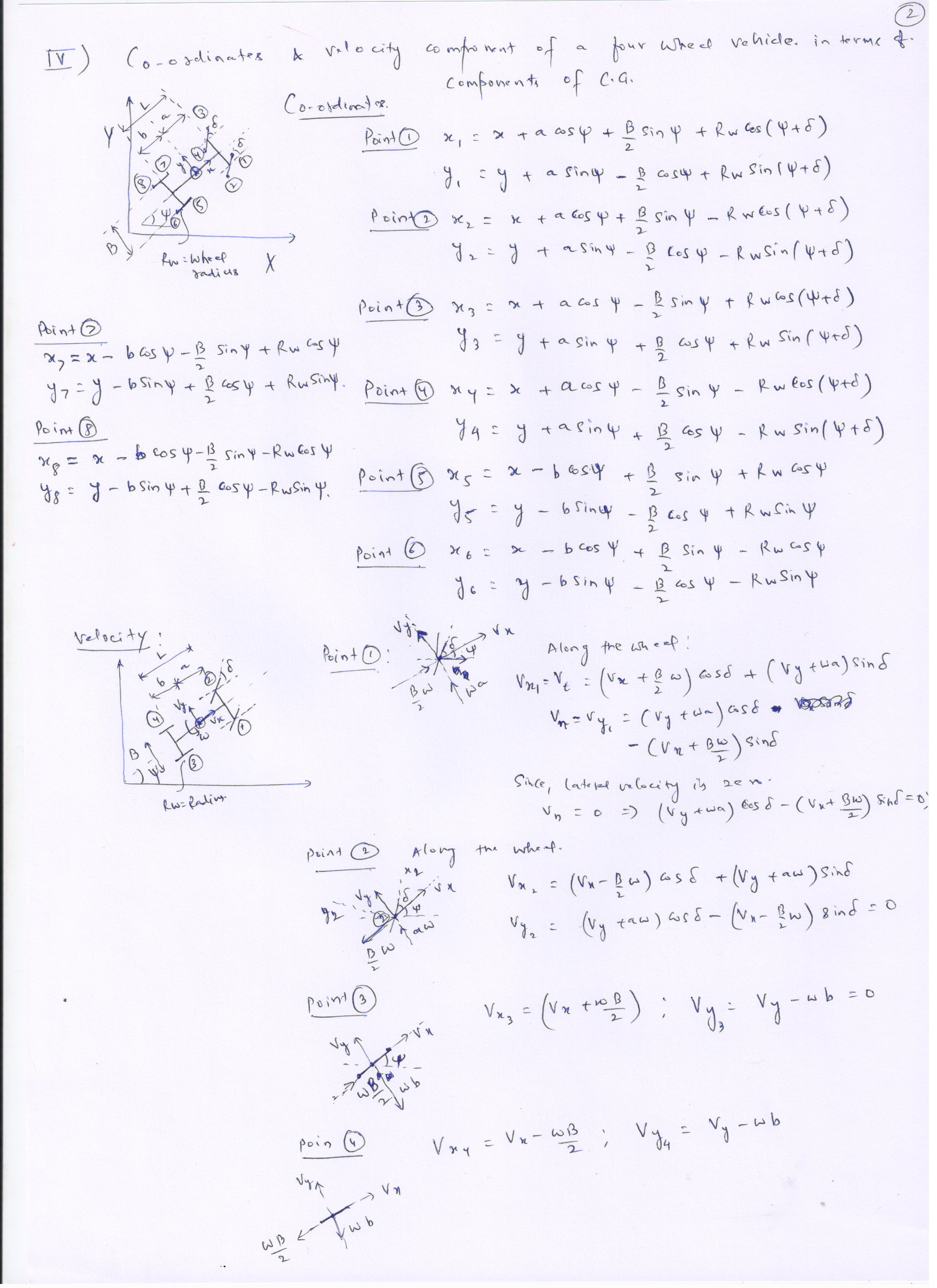
1. Free Body Diagram, Reference system, Position and Velocity of 4W Vehicle (05/01/2016) Lecture 1.1 , Lecture 1.2 ,
{kind=link}
{kind=link}
2. Axle loading and generalized equation of motion (08/01/2016) Lecture 2.1 , Lecture 2.2 , Lecture 2.3 ,
{kind=link}
{kind=link}
{kind=link}
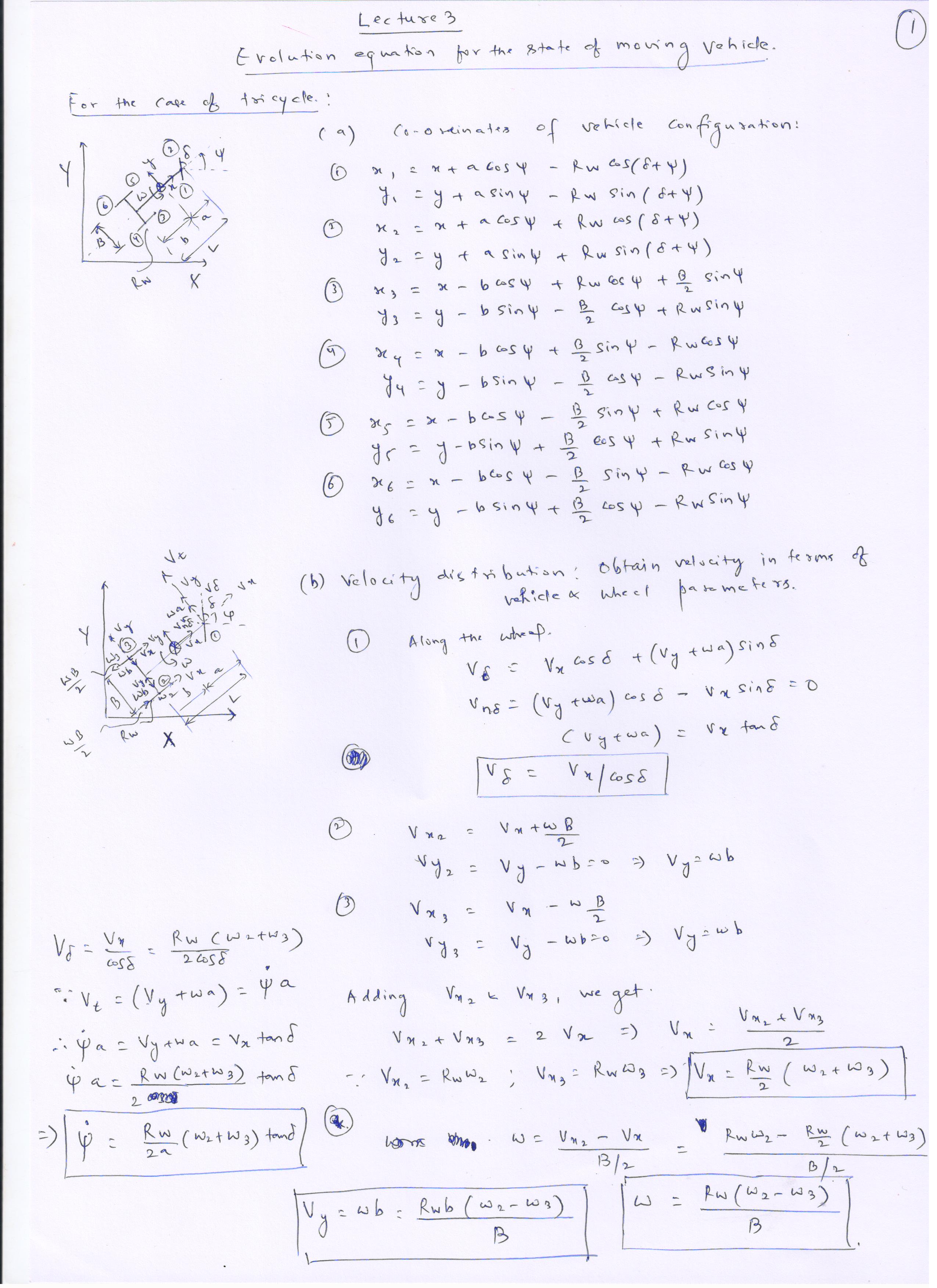
3. Evolution of the state of three wheel vehicle (Programming) (12/01/2016) Lecture 3.1 , Lecture 3.2 , Lecture 3.3 ,
{kind=link}
{kind=link}
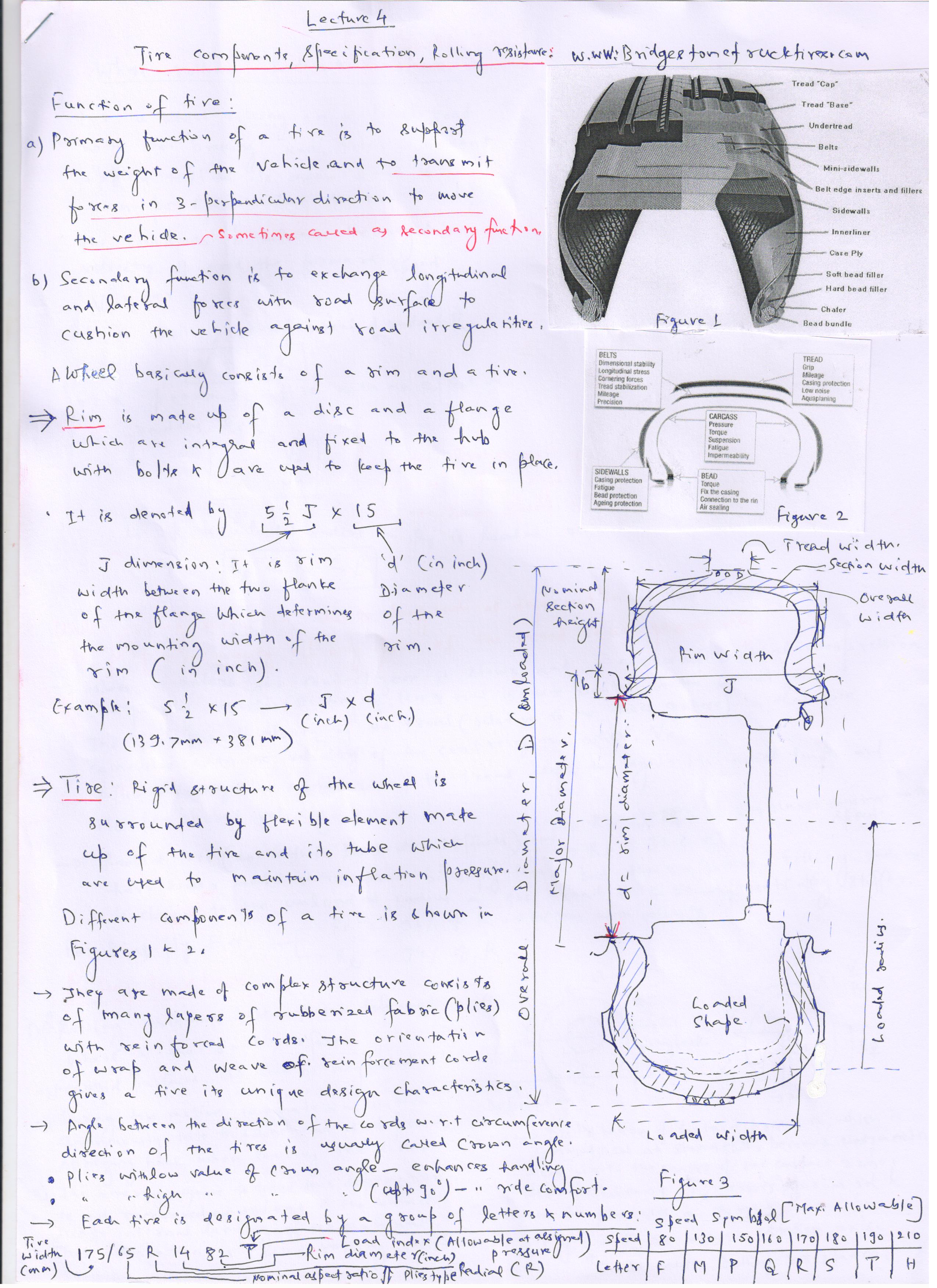
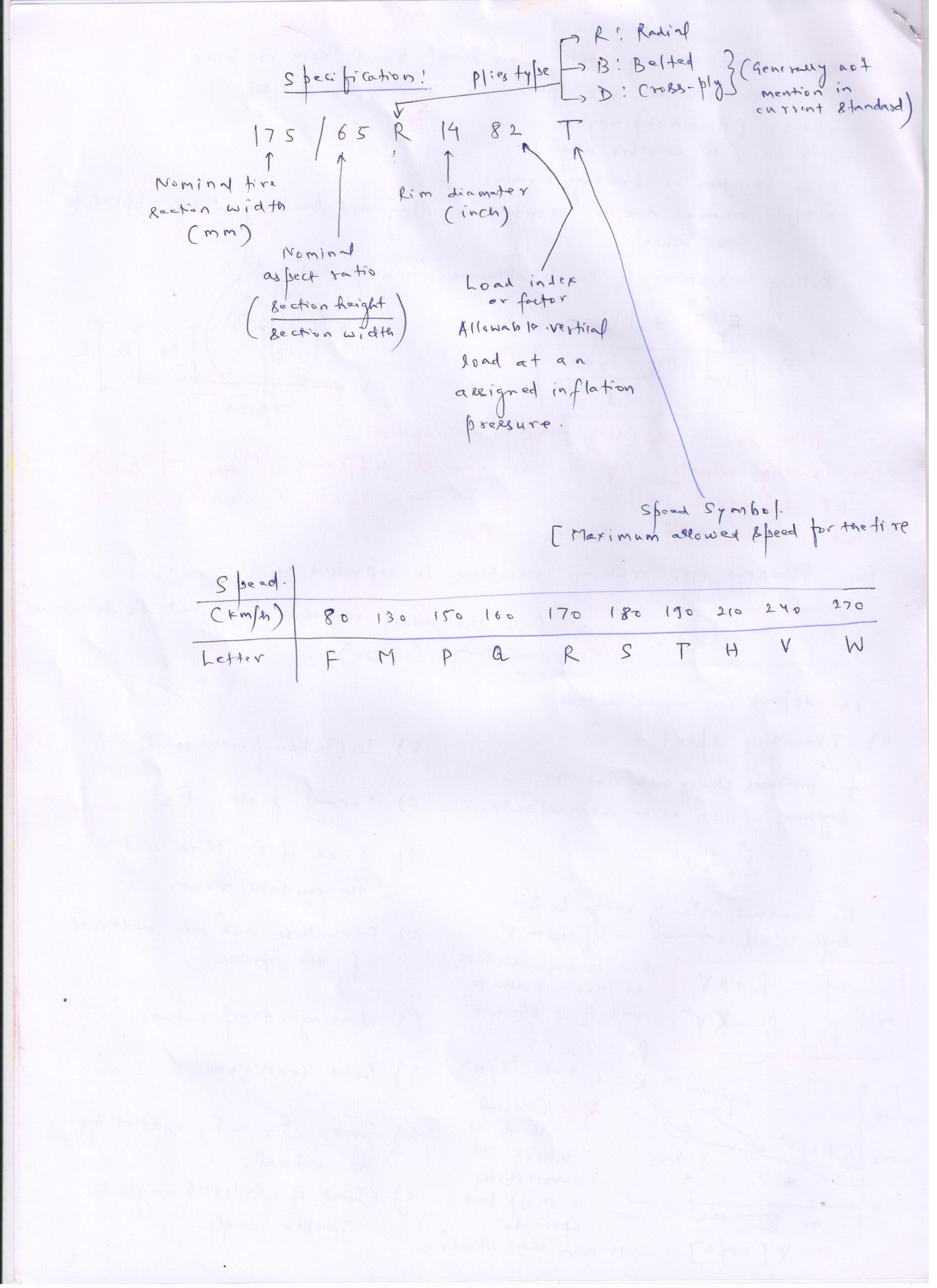
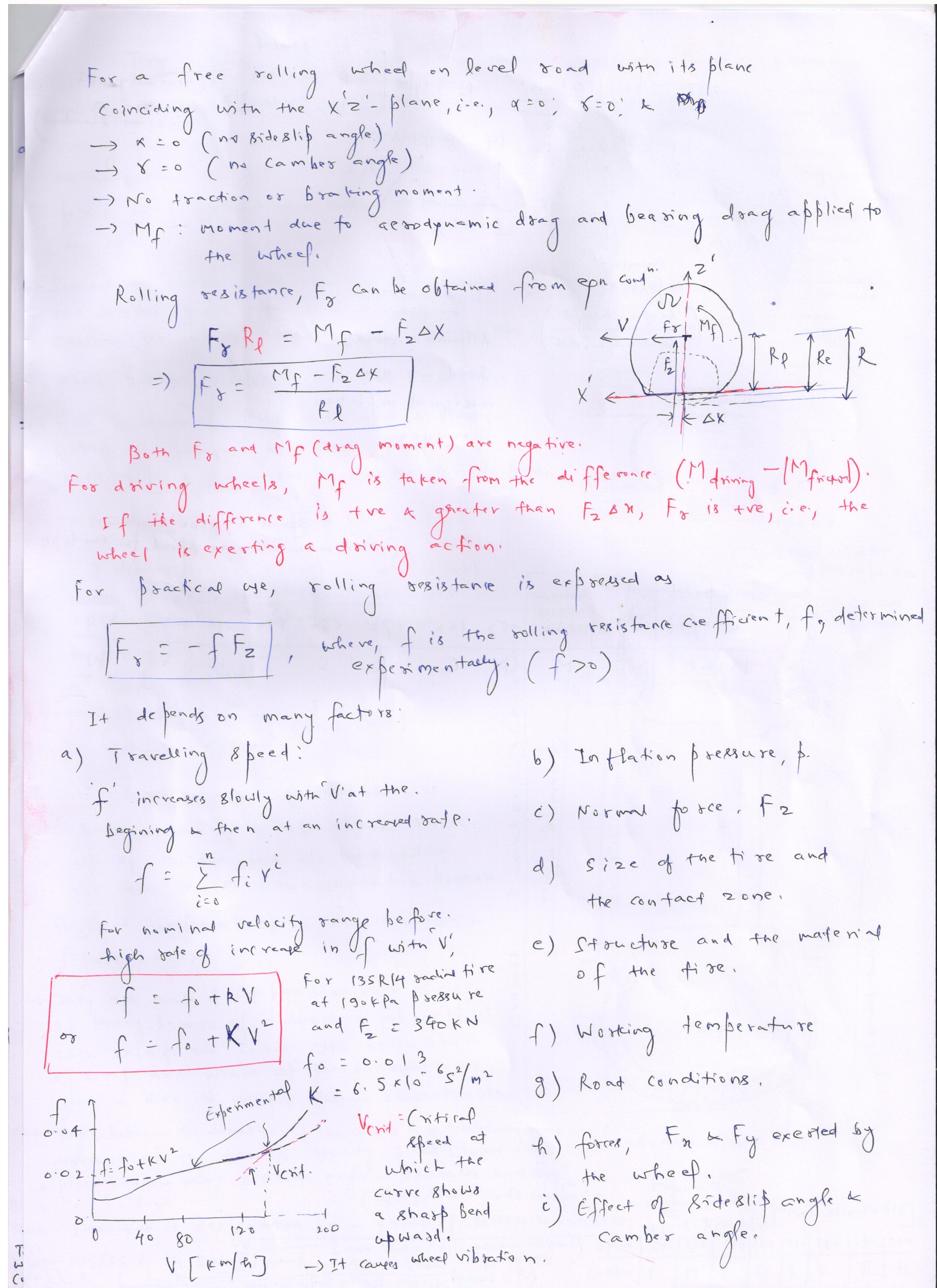
4. Tire components, Specification and tire rolling resistance (19/01/2016) Lecture 4.1 , Lecture 4.2 , Lecture 4.3 , Lecture 4.4 ,
{kind=link}
{kind=link}
{kind=link}
{kind=link}
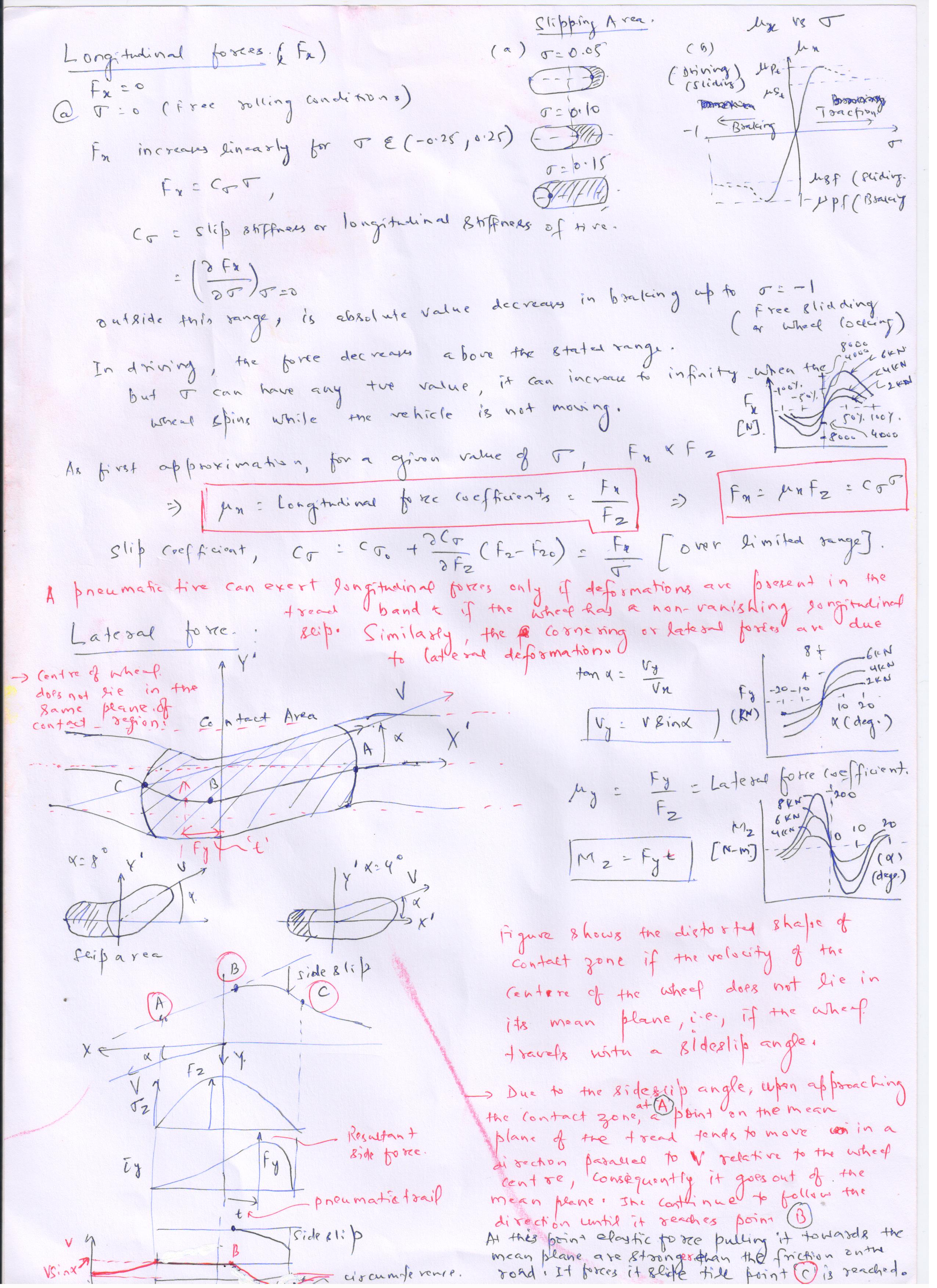
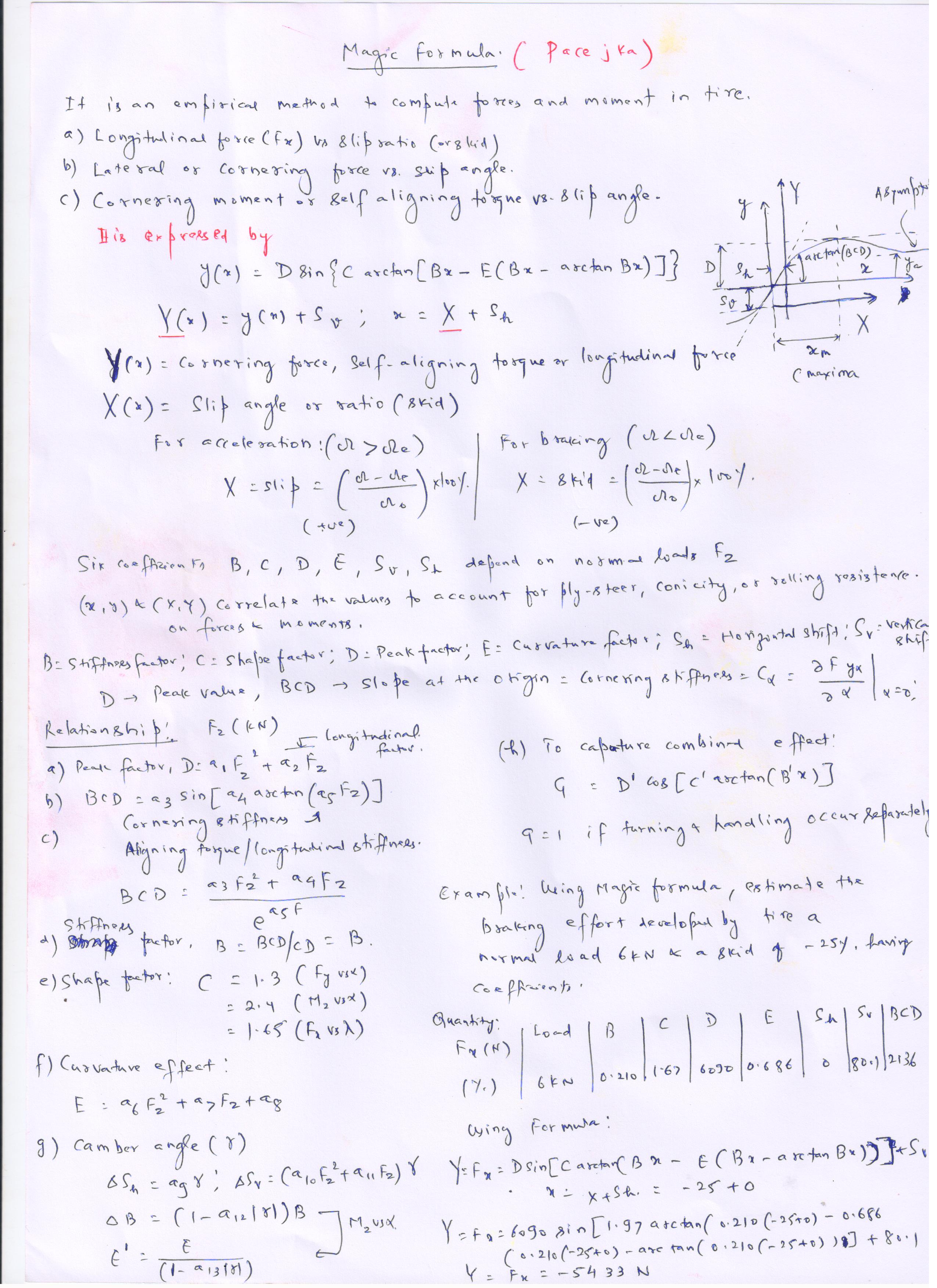
5. Longitudinal force, Lateral Force and Moment, Magic Formula (22/01/2016) Lecture 5.1 , Lecture 5.2 , Lecture 5.3 ,
{kind=link}
{kind=link}
{kind=link}
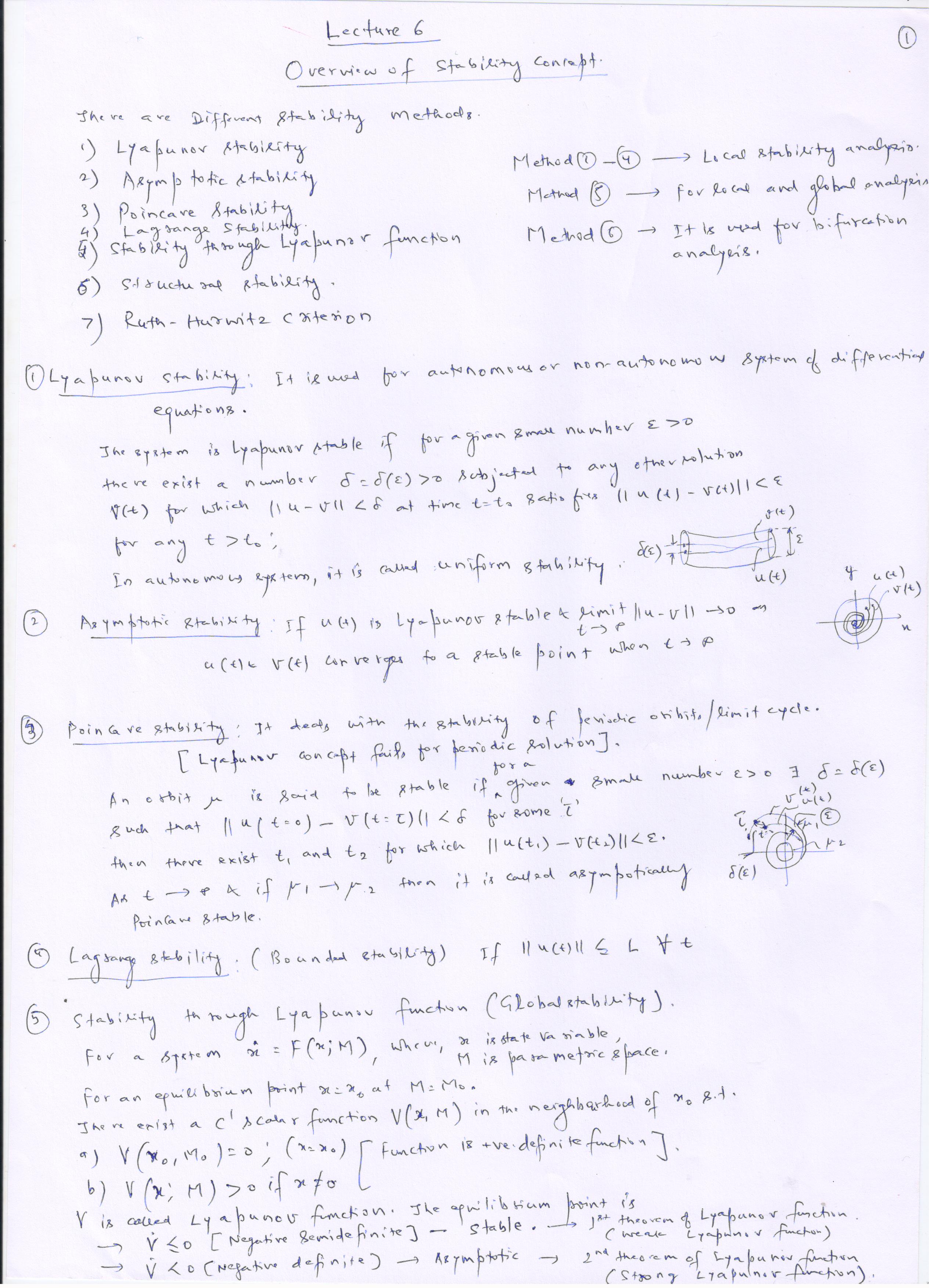
6. Stability Concept and Local Stability Criterion (05/02/2016) Lecture 6.1 , Lecture 6.2 ,
{kind=link}
{kind=link}
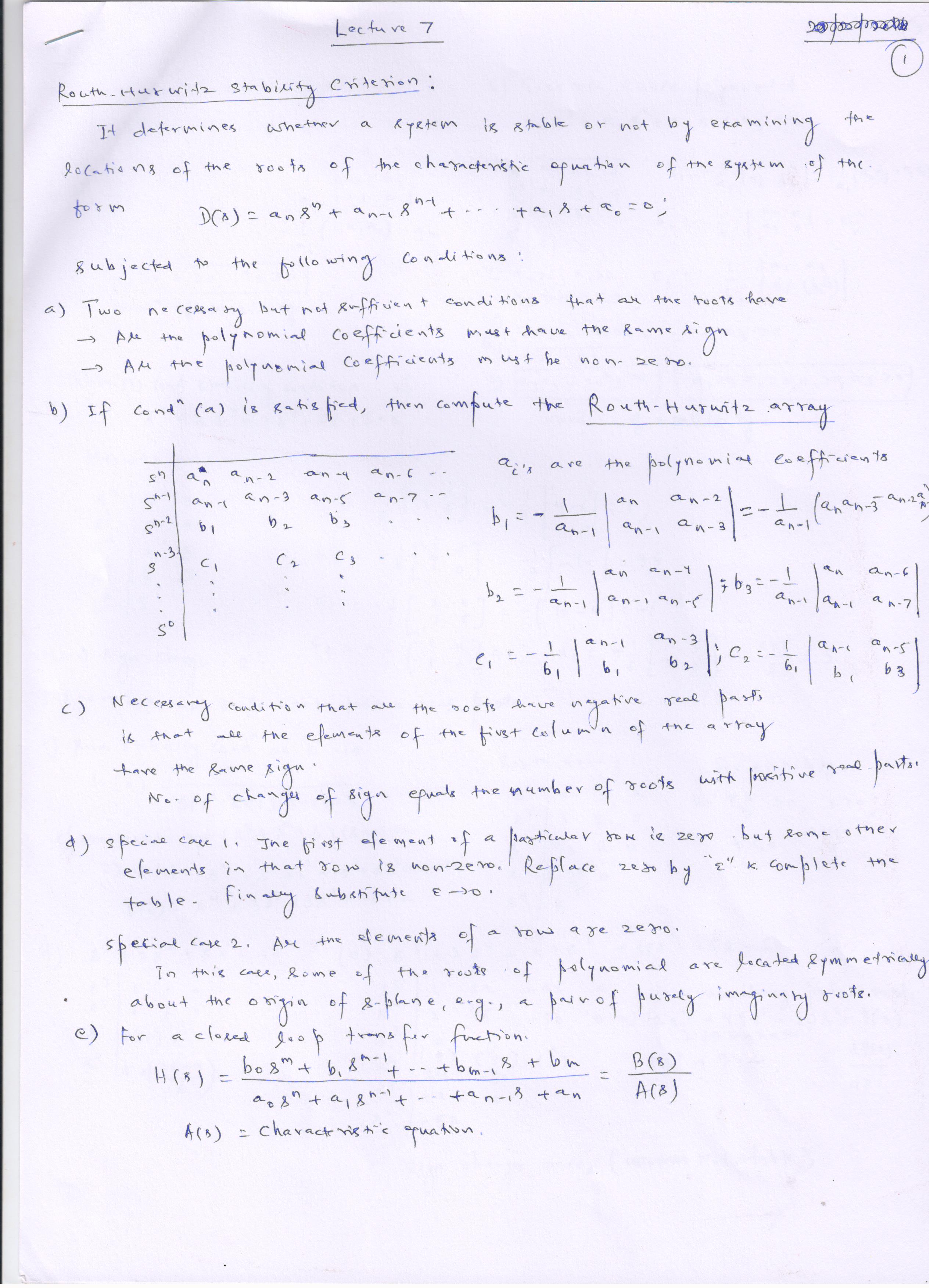
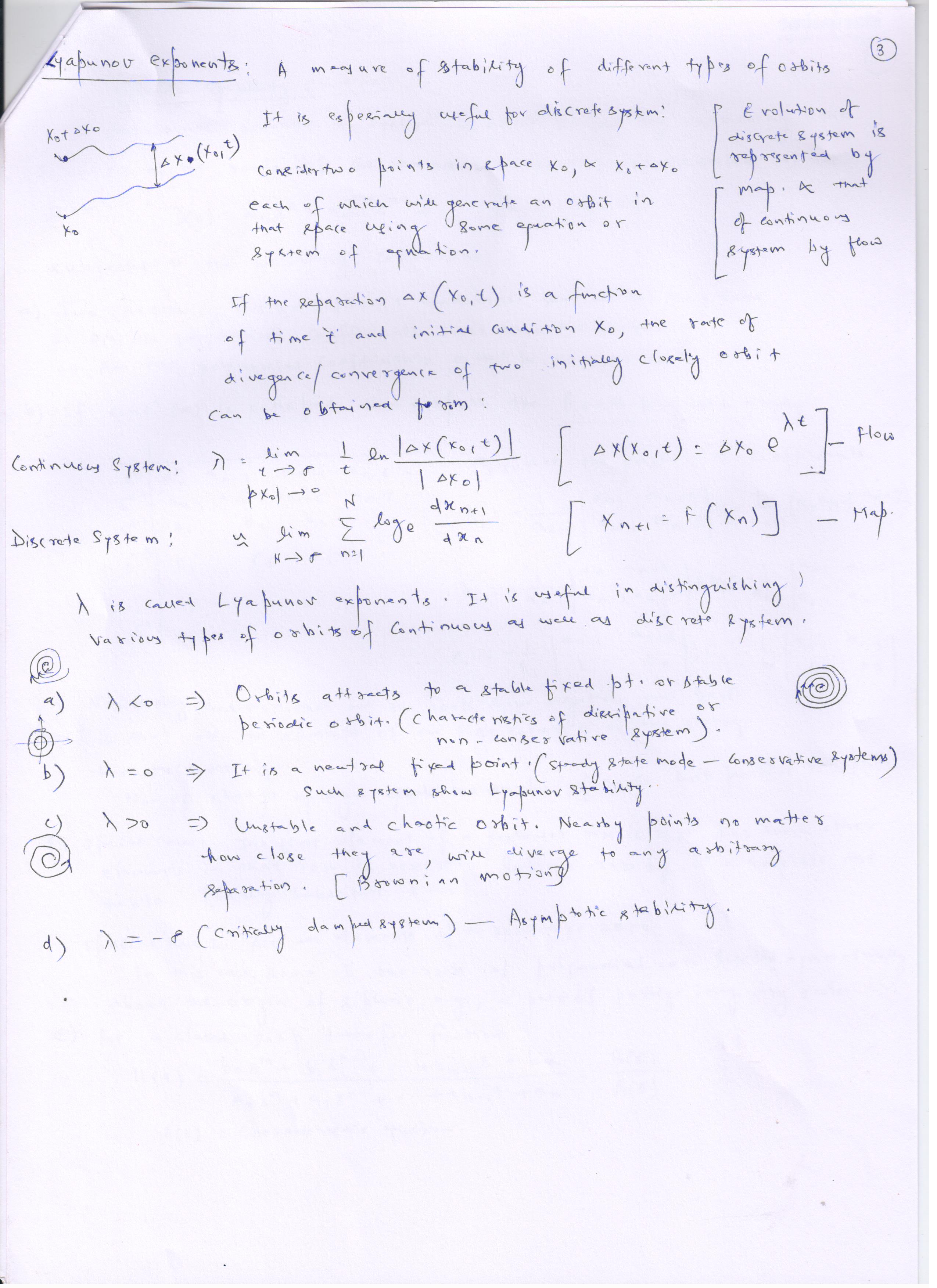
7. Ruth-Hurwitz Criterion and Lyapunov Exponent (09/02/2016) Lecture 7.1 , Lecture 7.2 , Lecture 7.3 ,
{kind=link}
{kind=link}
{kind=link}
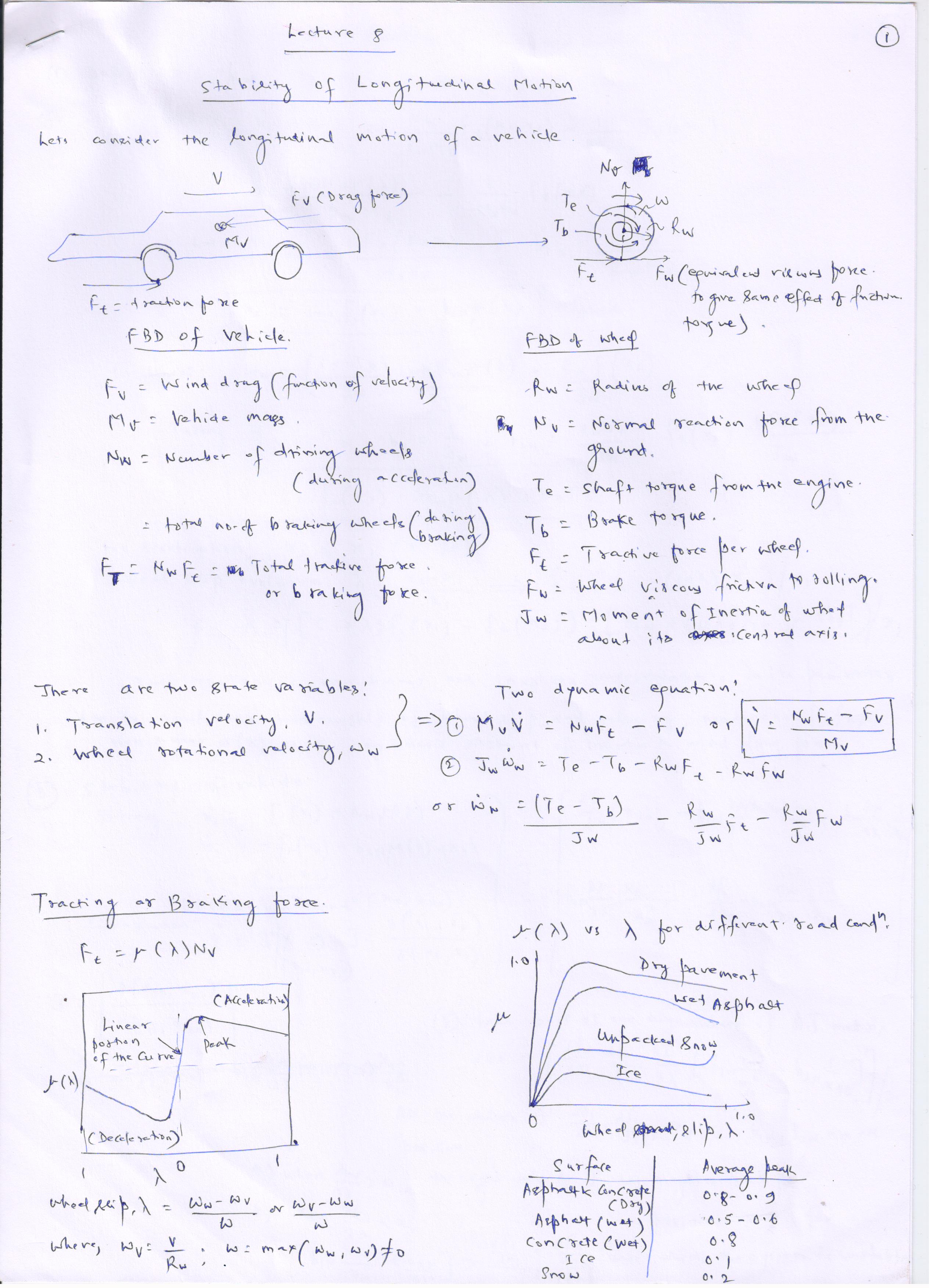
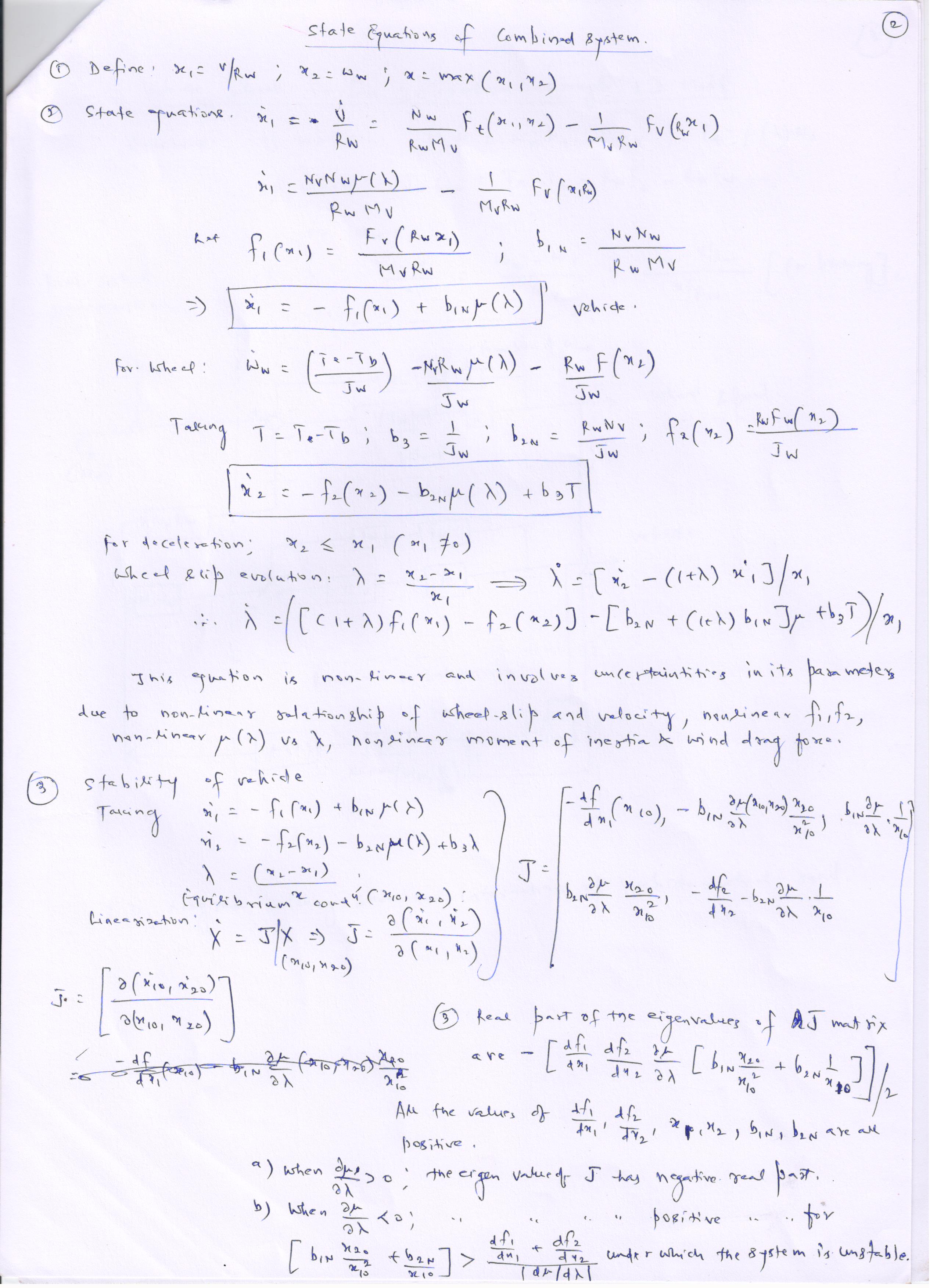
8. Stability of longitudinal motion (12/02/2016) Lecture 8.1 , Lecture 8.2 , Lecture 8.3 ,
{kind=link}
{kind=link}
{kind=link}
9. Basic concept of PID controller (16/02/2016) Lecture 9.1 , Lecture 9.2 ,
{kind=link}
{kind=link}
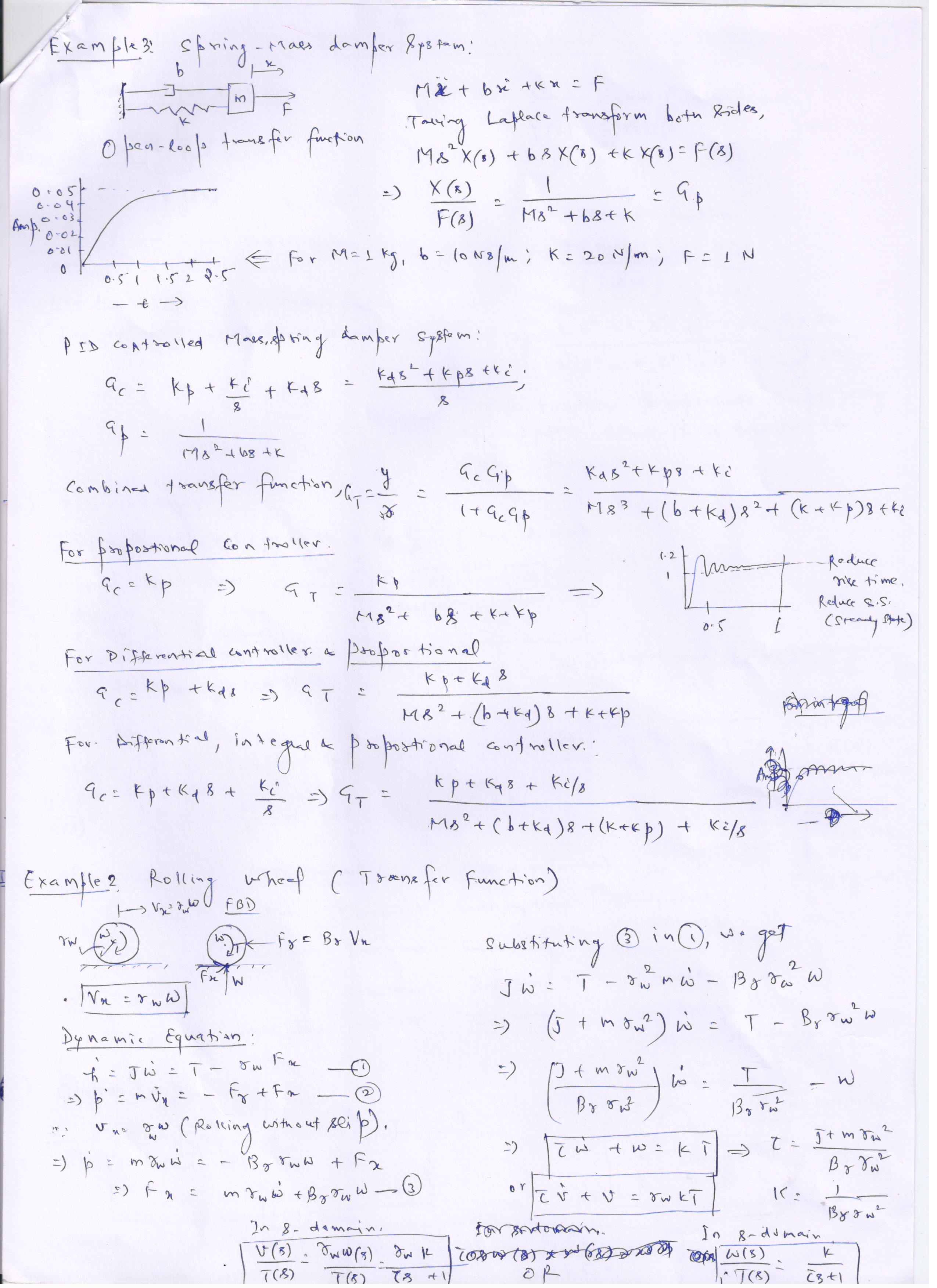
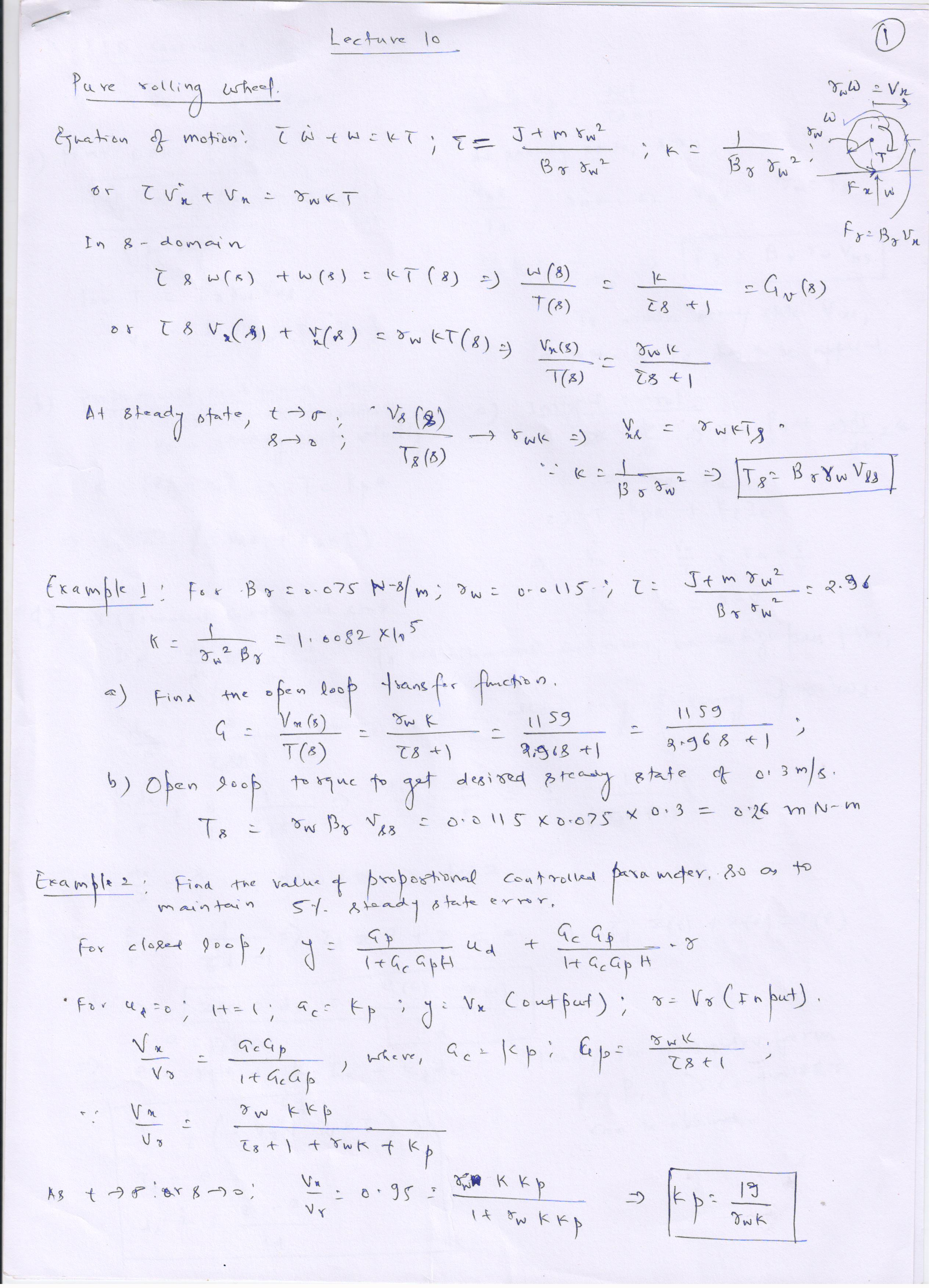
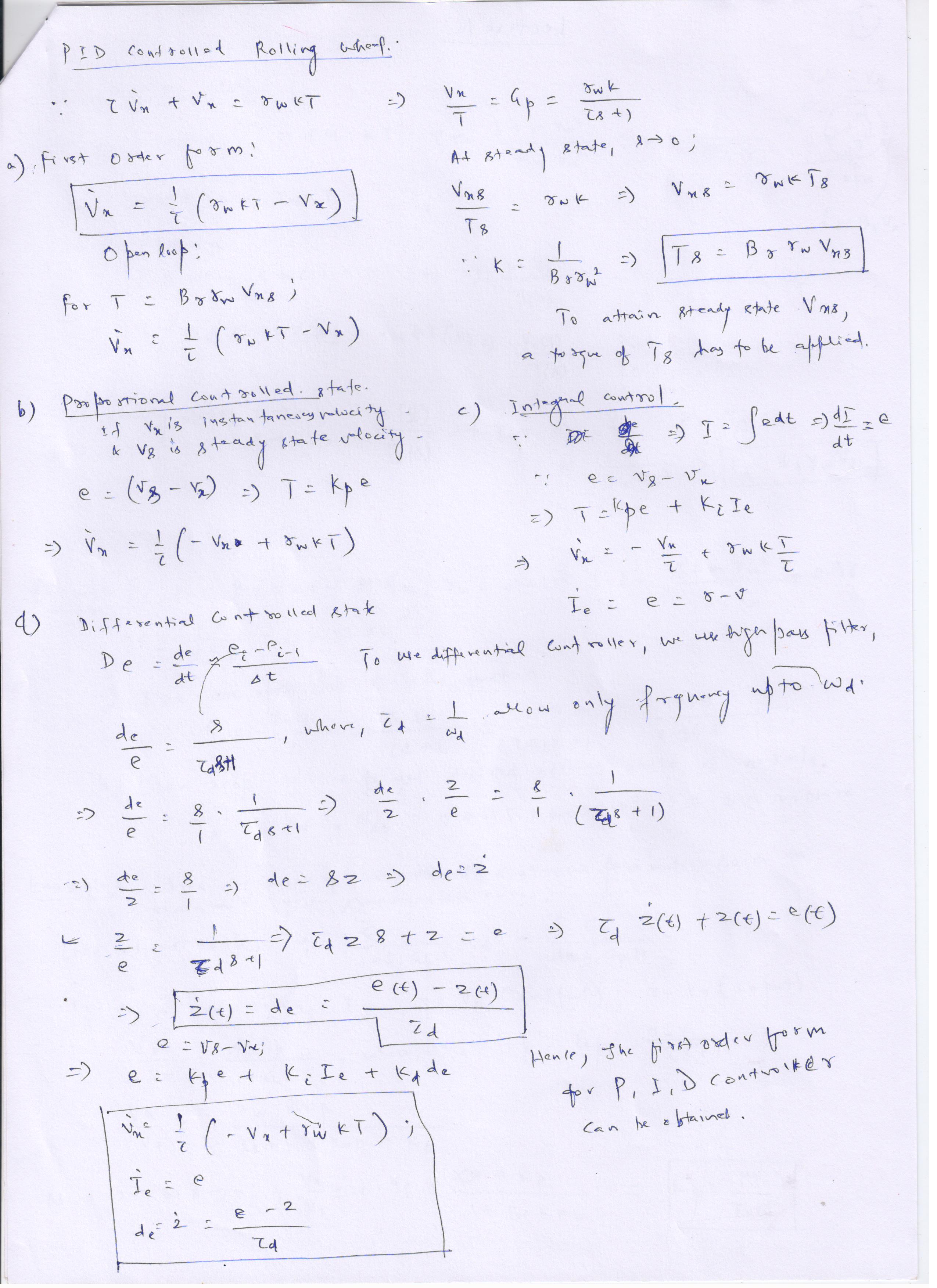
10. Control criterion of rolling wheel (19/02/2016) Lecture 10.1 , Lecture 10.2 ,
{kind=link}
{kind=link}
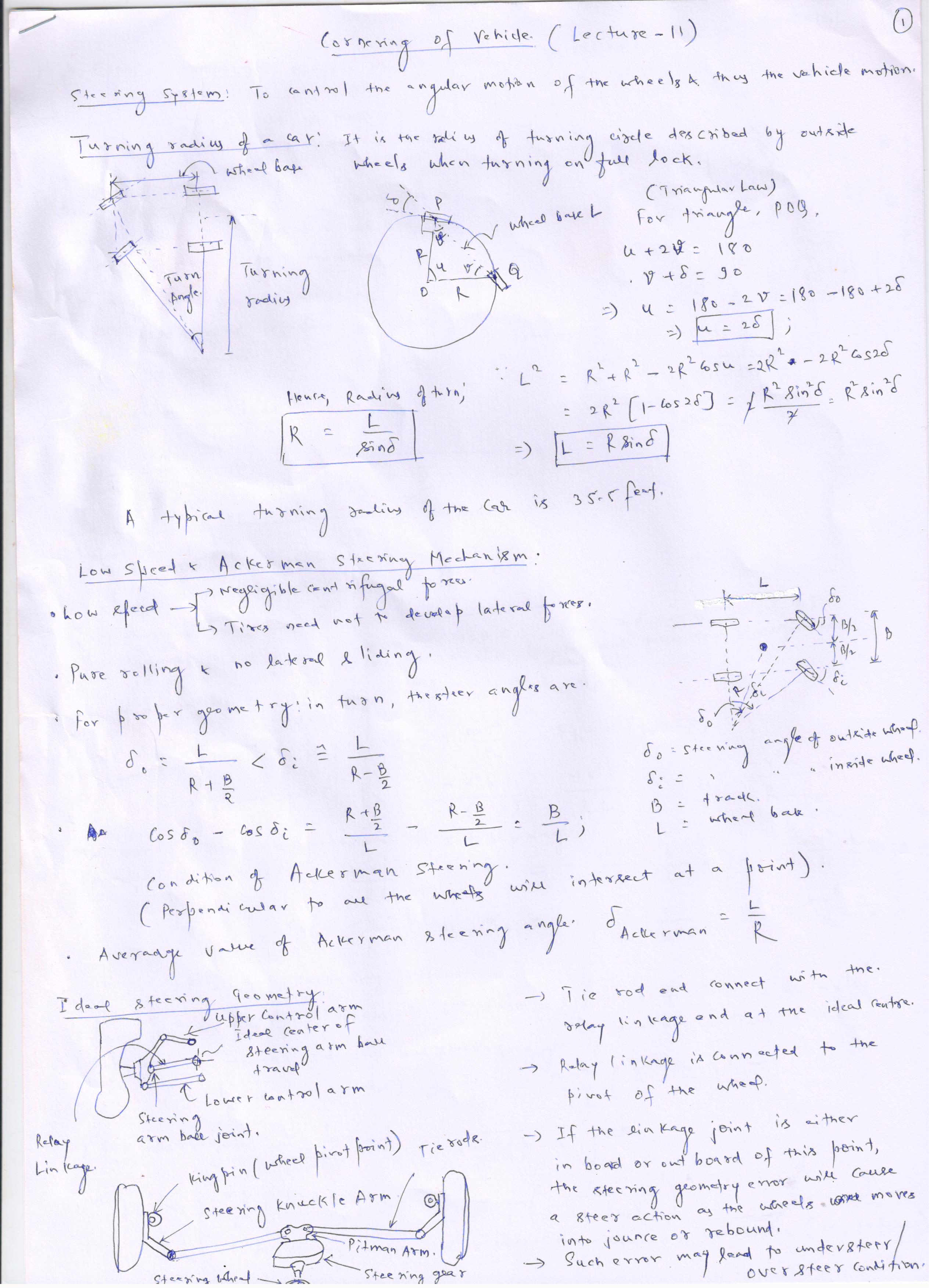
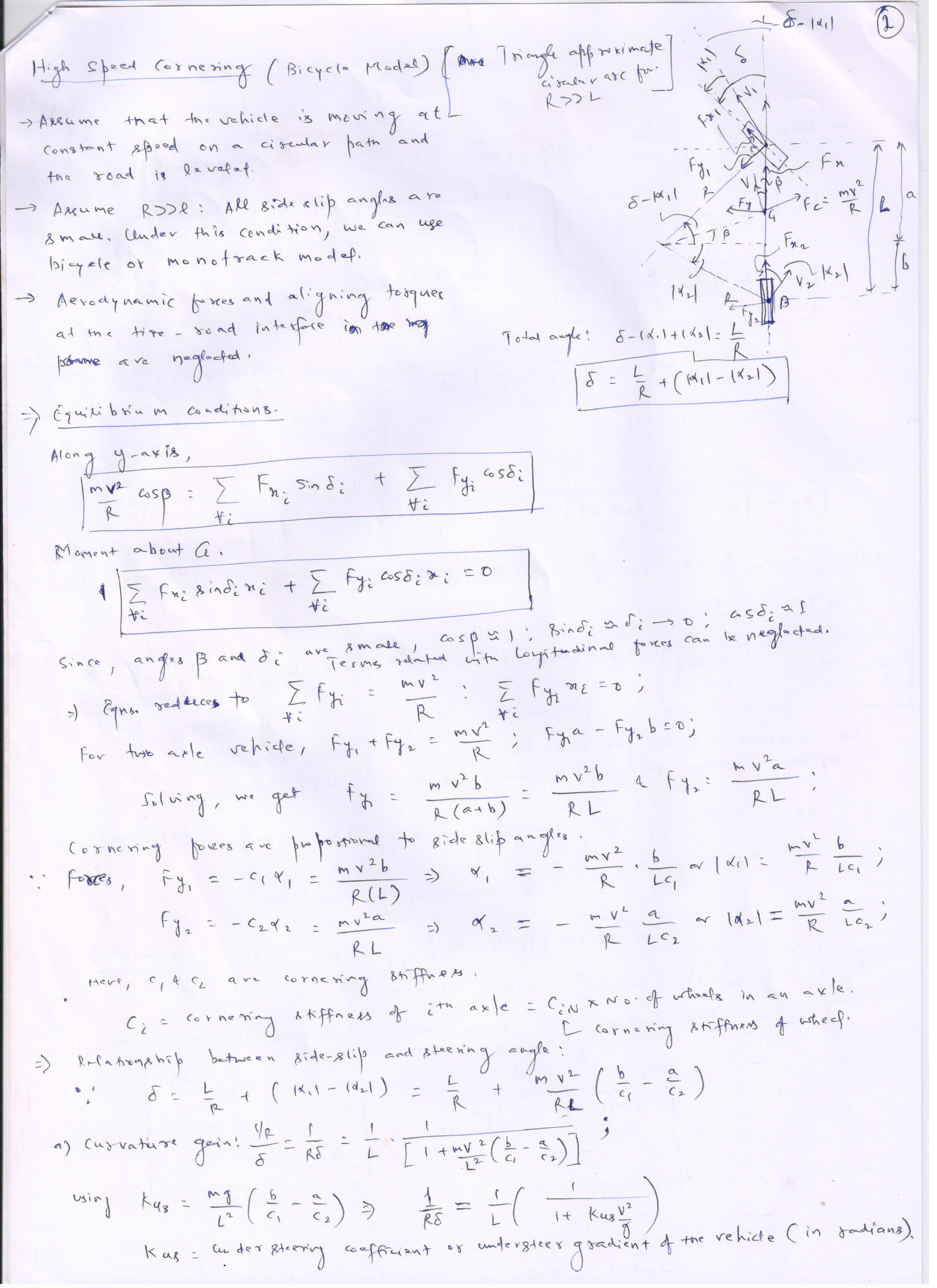
11. Cornering of vehicle with under, over and neutral steering conditions. (01/03/2016 and 04/03/3016) Lecture 11.1 , Lecture 11.2 , Lecture 11.3 ,
{kind=link}
{kind=link}
{kind=link}
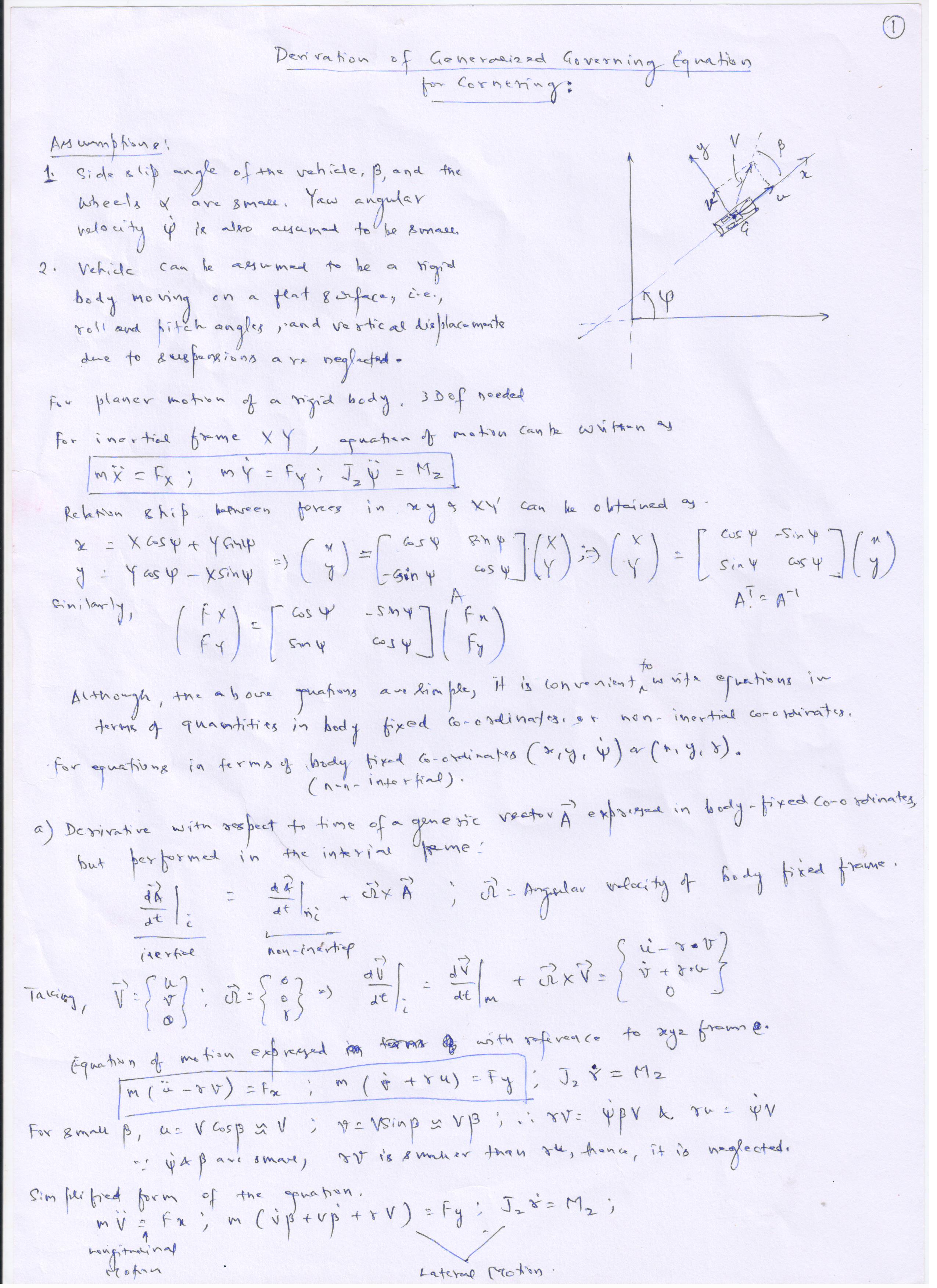
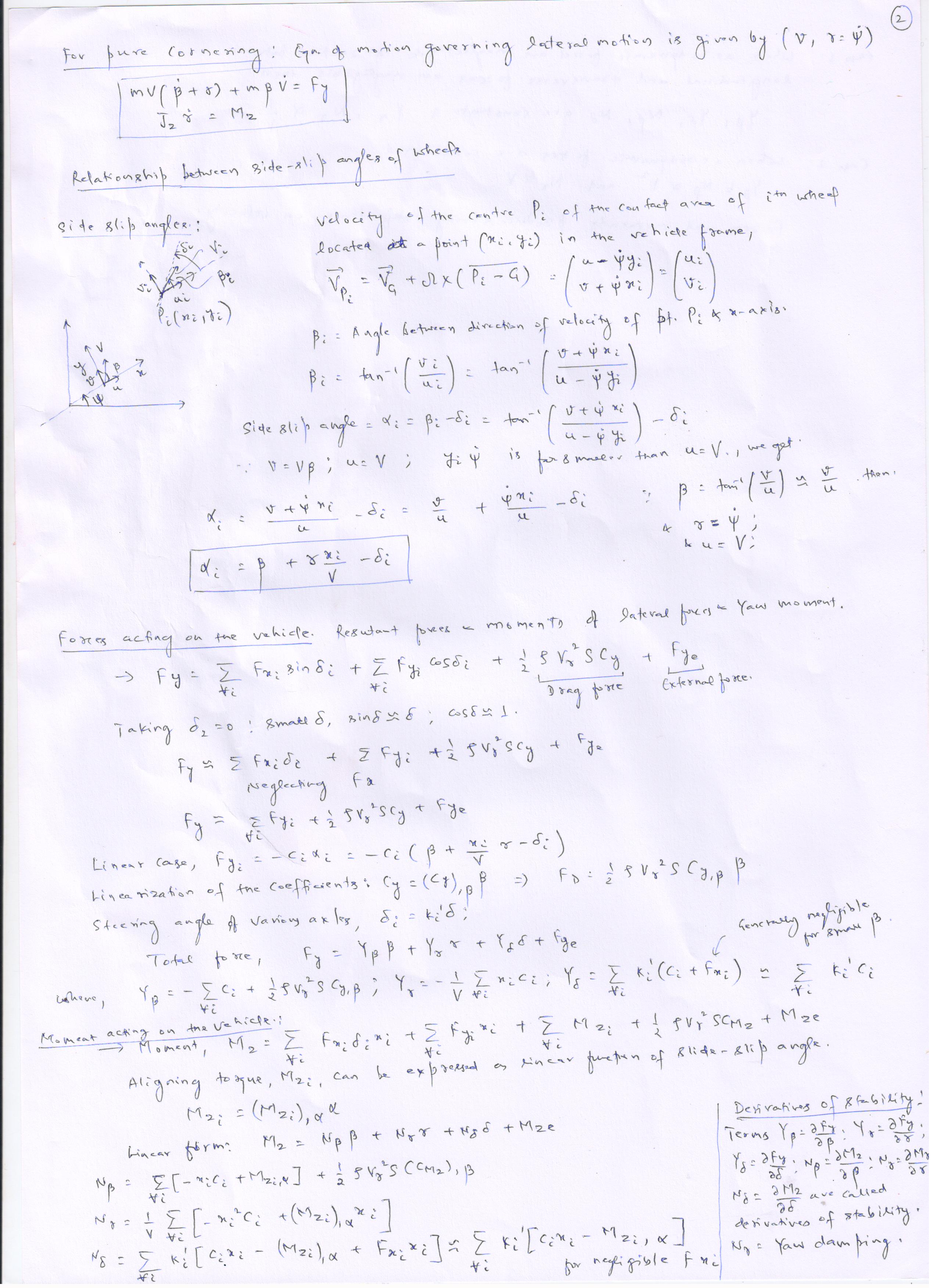
12. Generalized equation of vehicle cornering (11/03/2016 ) Lecture 12.1 , Lecture 12.2 ,
{kind=link}
{kind=link}
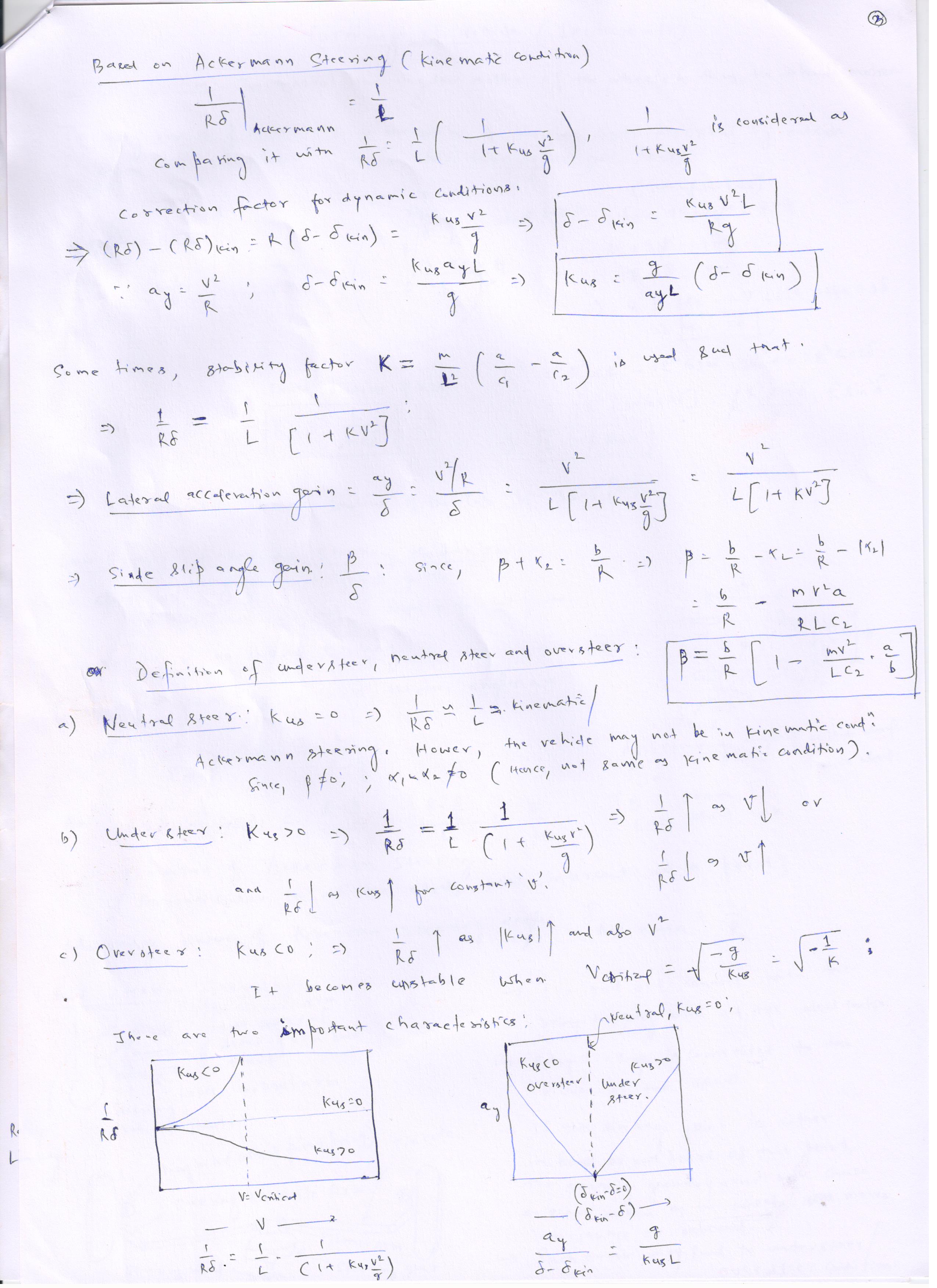
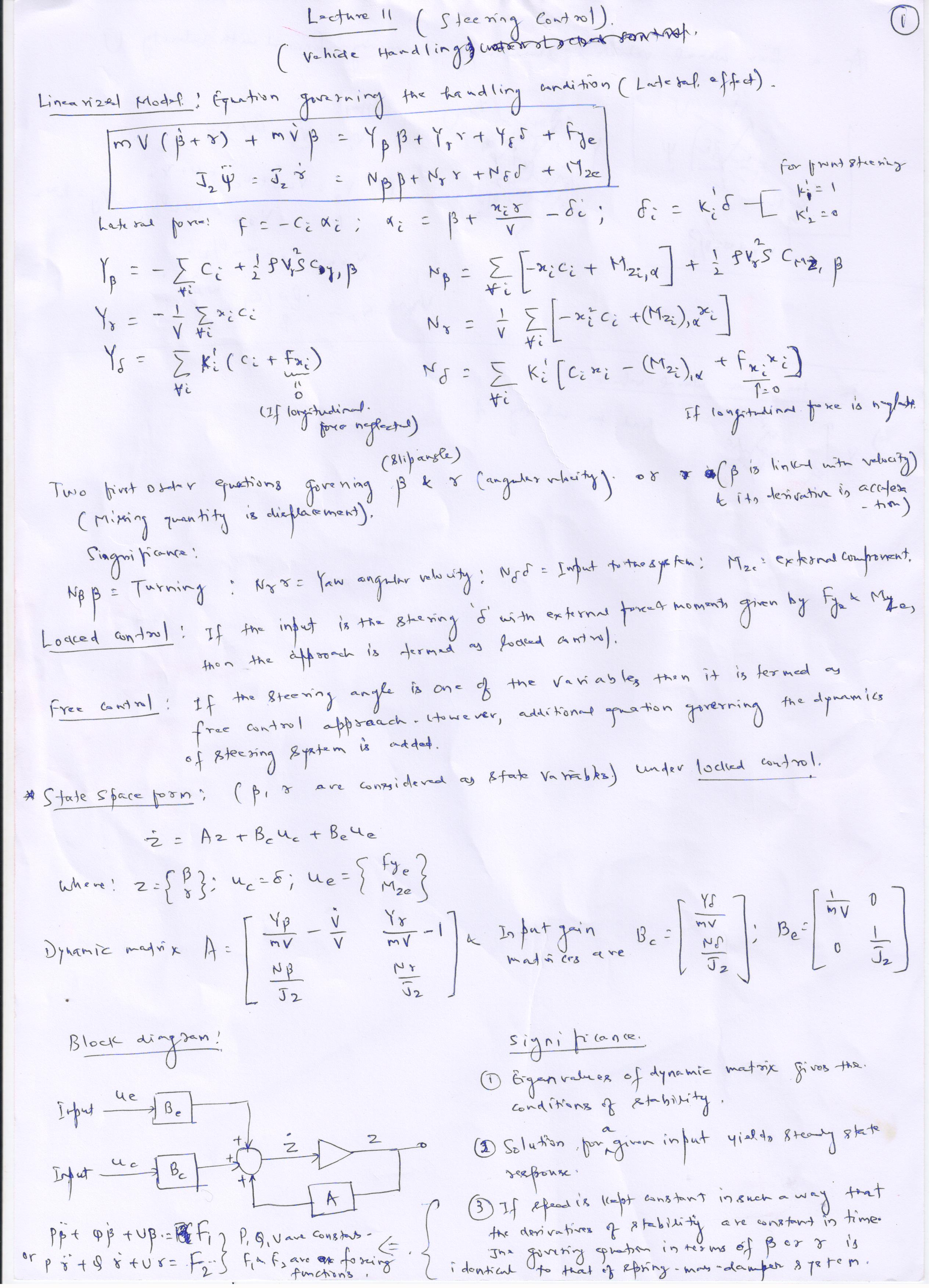
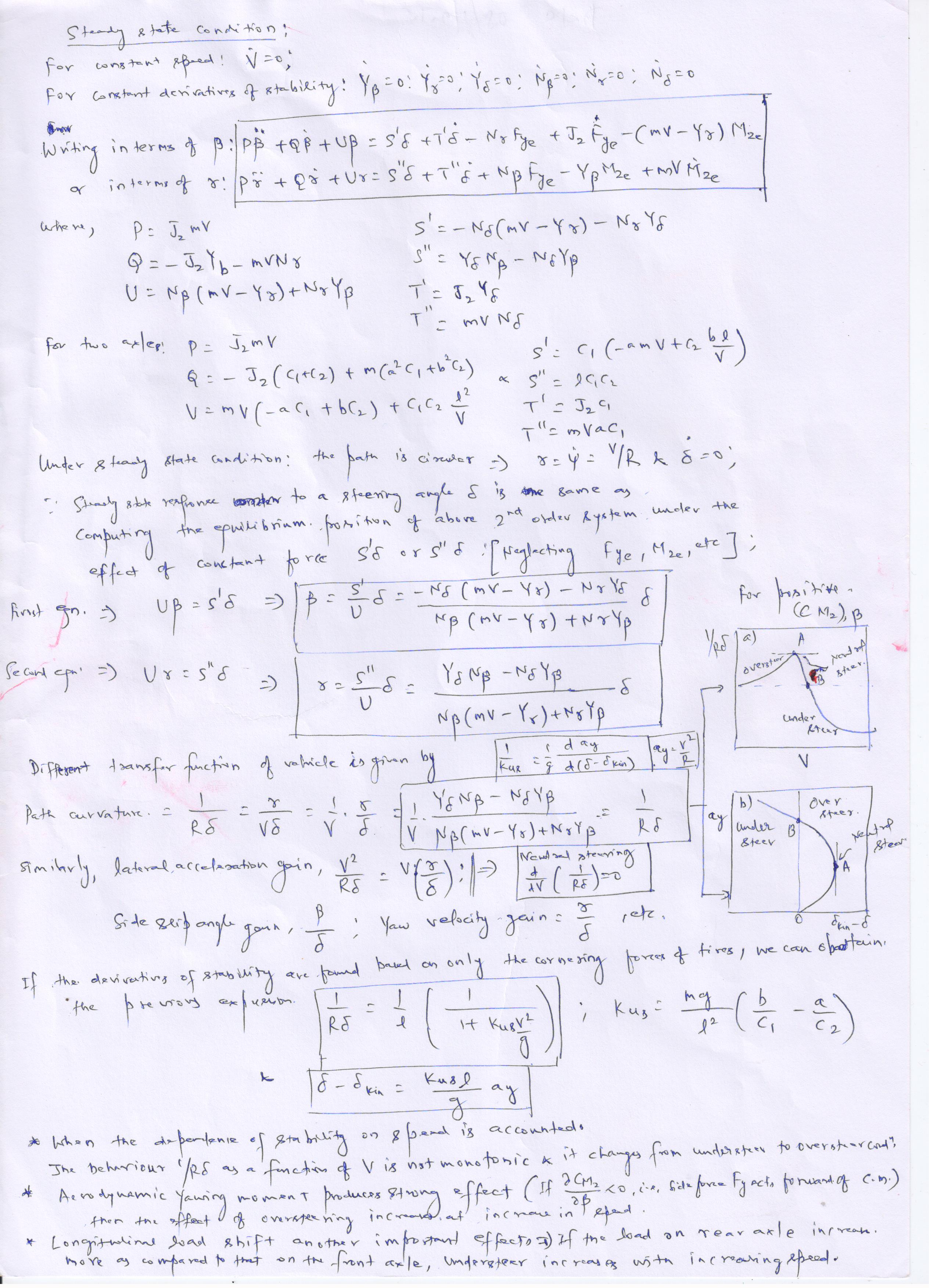
13. Vehicle handling under locked control:Redefinition of understeer, neutral and over steer conditions (15/03/2016 ) Lecture 13.1 , Lecture 13.2 ,
{kind=link}
{kind=link}
14. Vehicle handling: Driver-Vehicle Model (18/03/2016 ) Lecture 14.1 , Lecture 14.2 ,
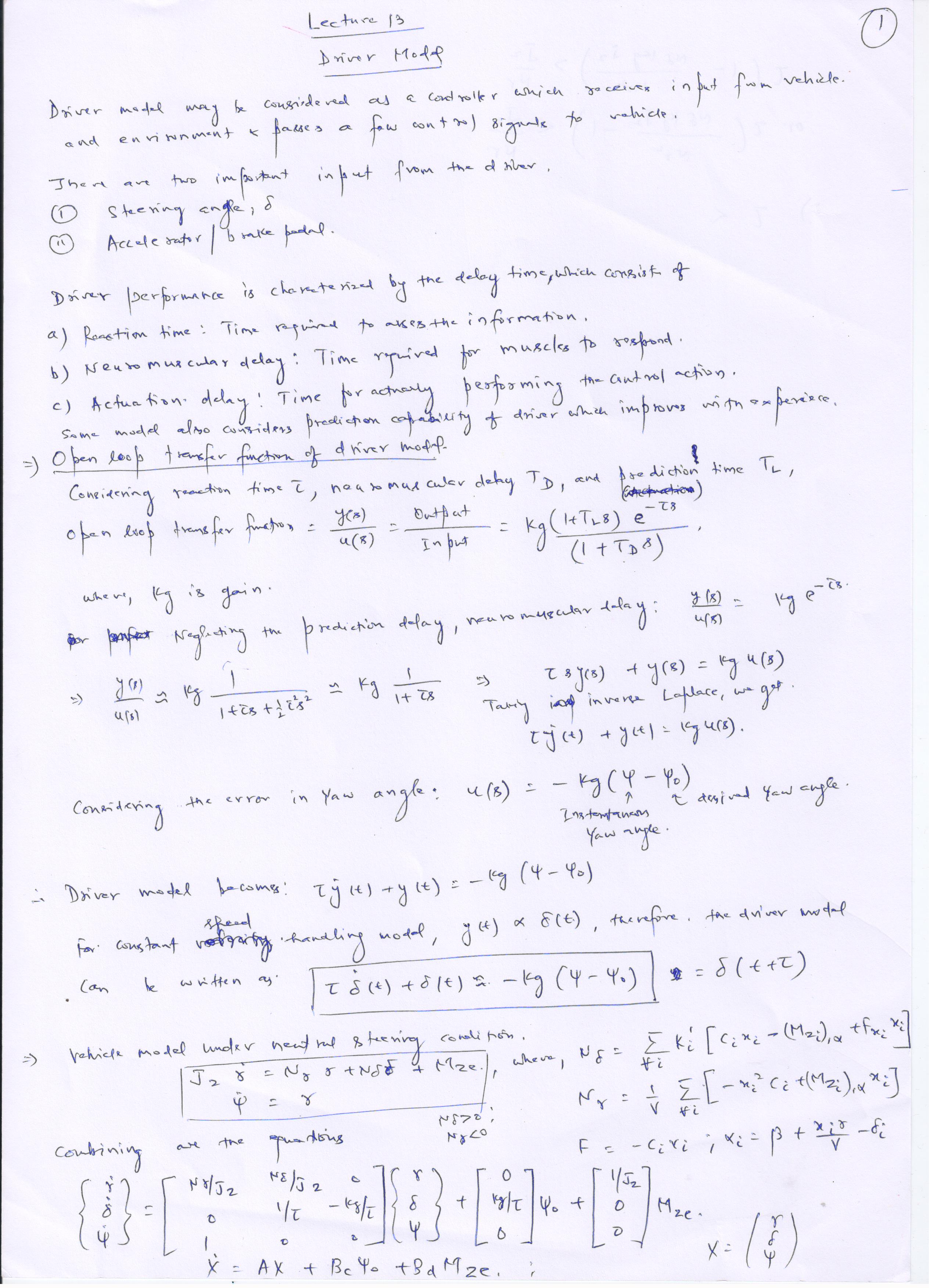{kind=link}
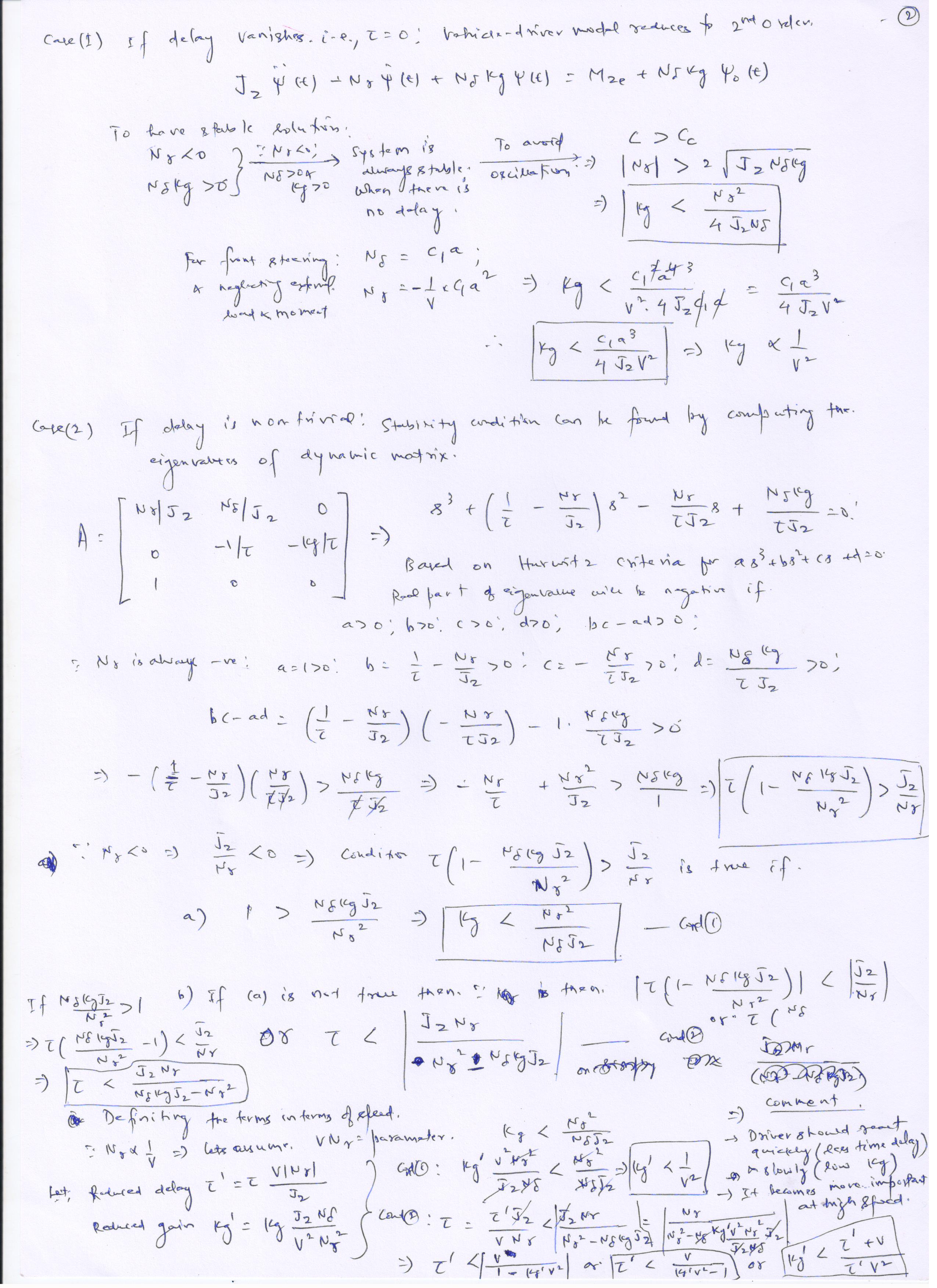{kind=link}
15. Performance of Vehicle Comfort: Introduction (29/03/2016 ) Lecture 15.1 , Lecture 15.2 ,
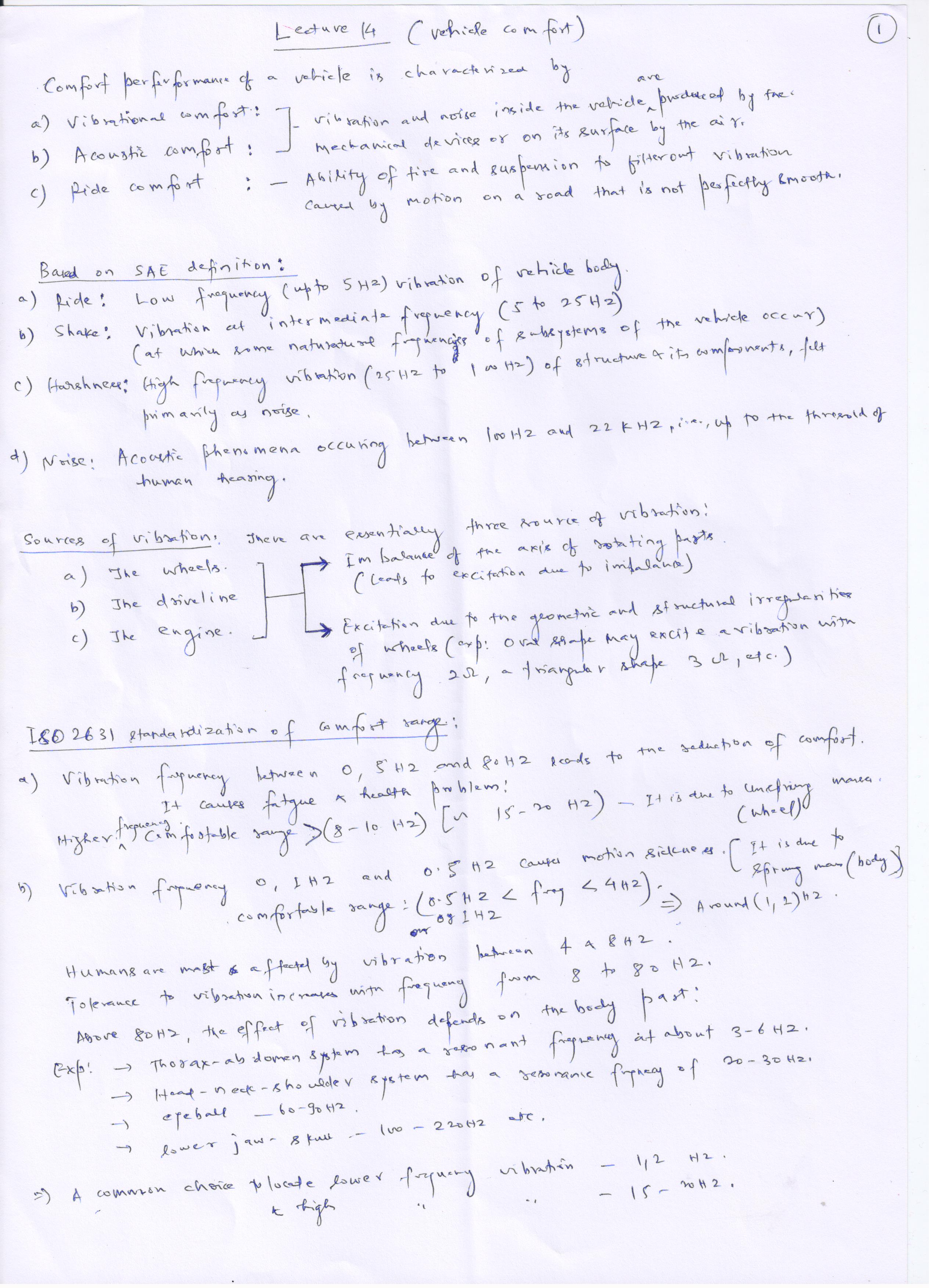{kind=link}
{kind=link}
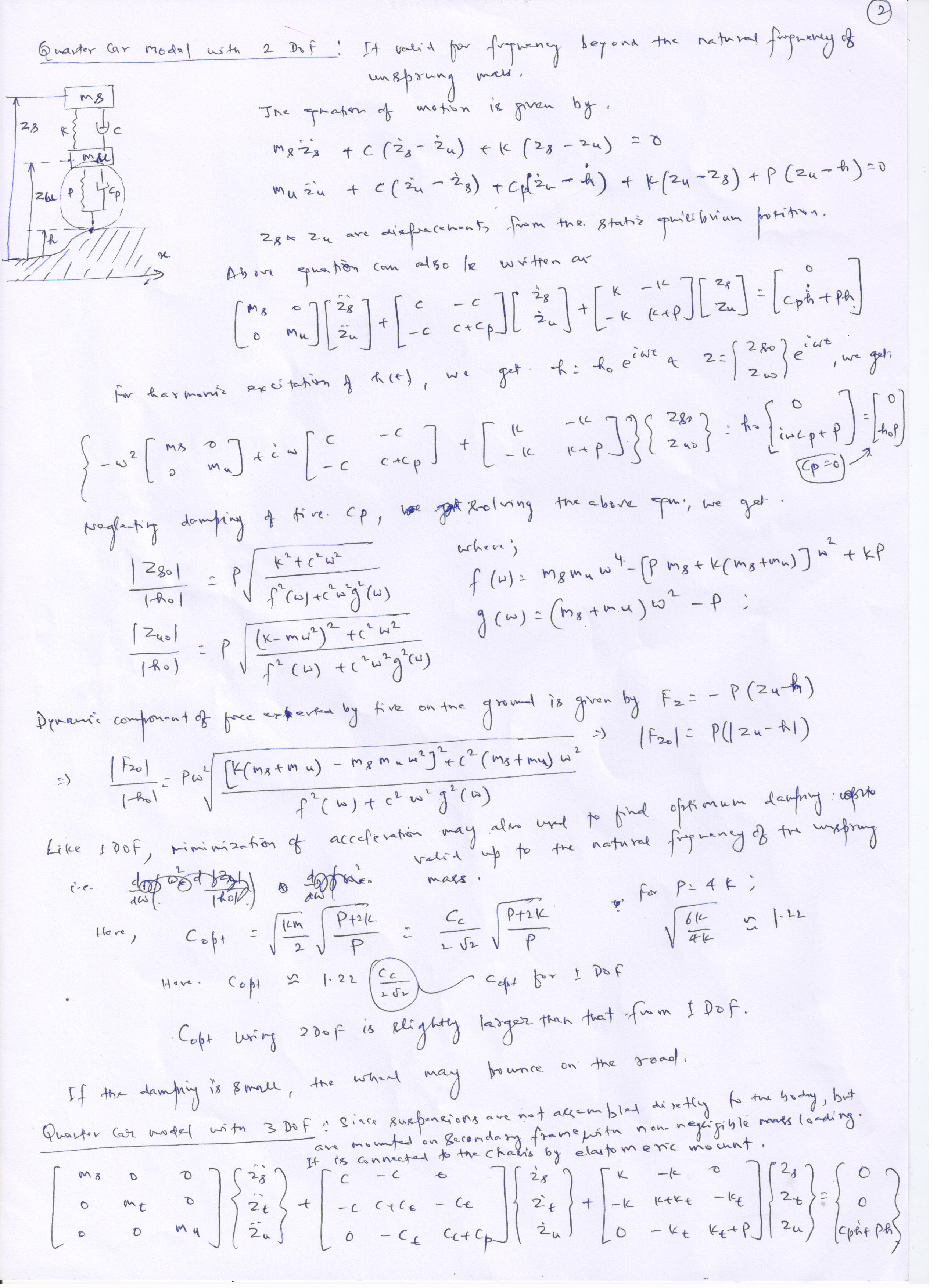
16. Dynamic Characteristics of Comfort Ride: Quarter Car Model (30/03/2016 ) Lecture 16.1 , Lecture 16.2 ,
{kind=link}
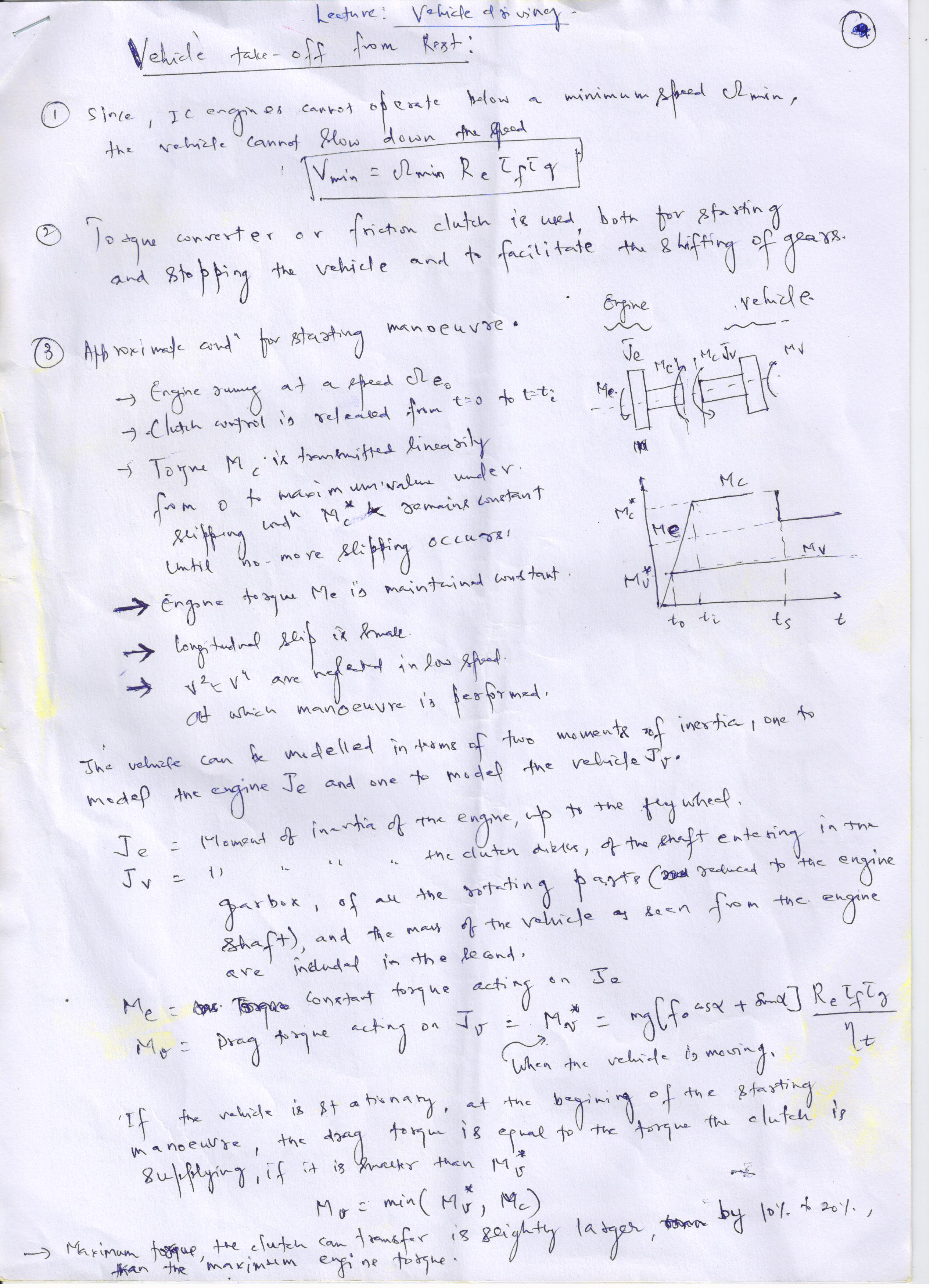
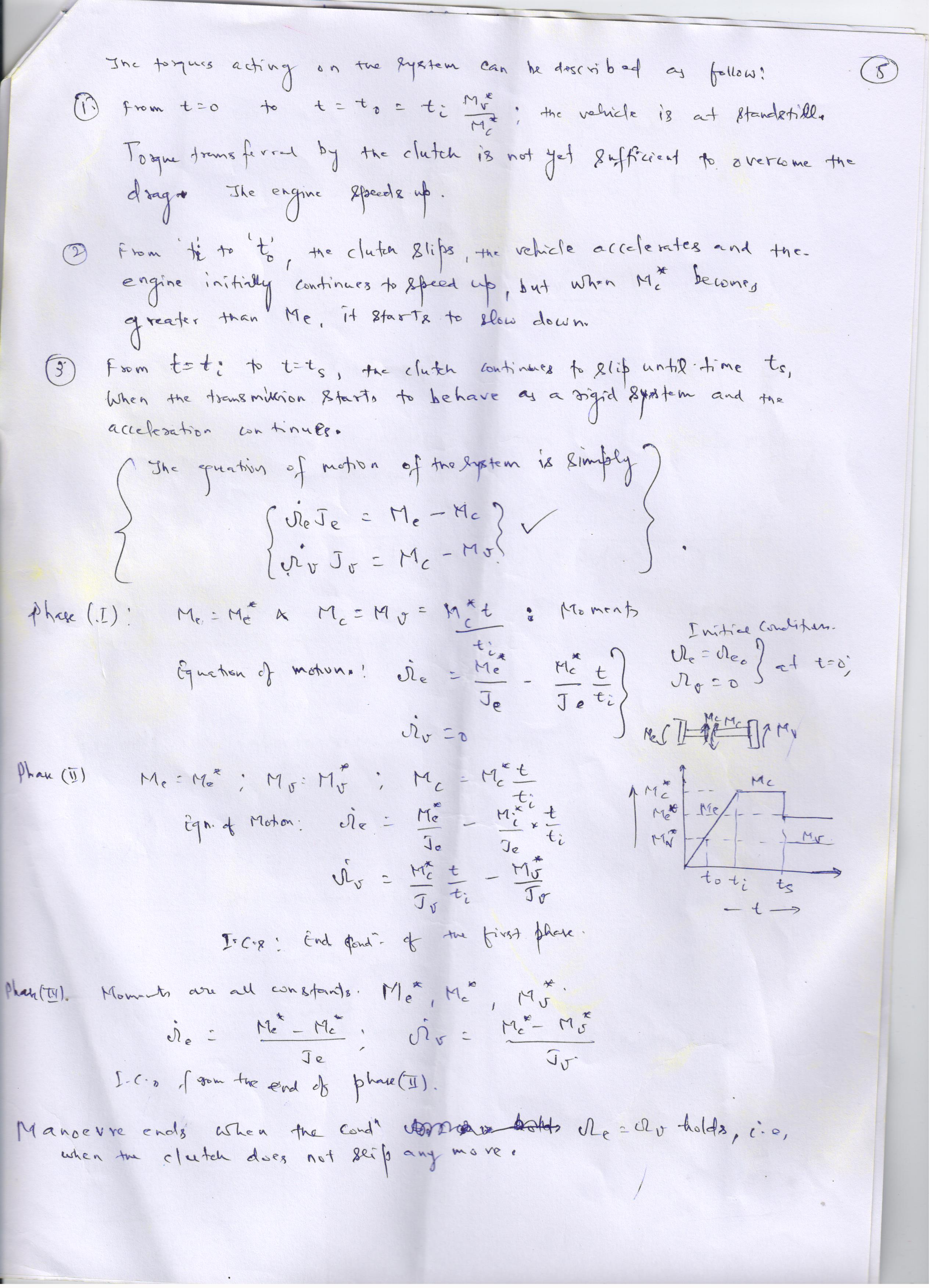
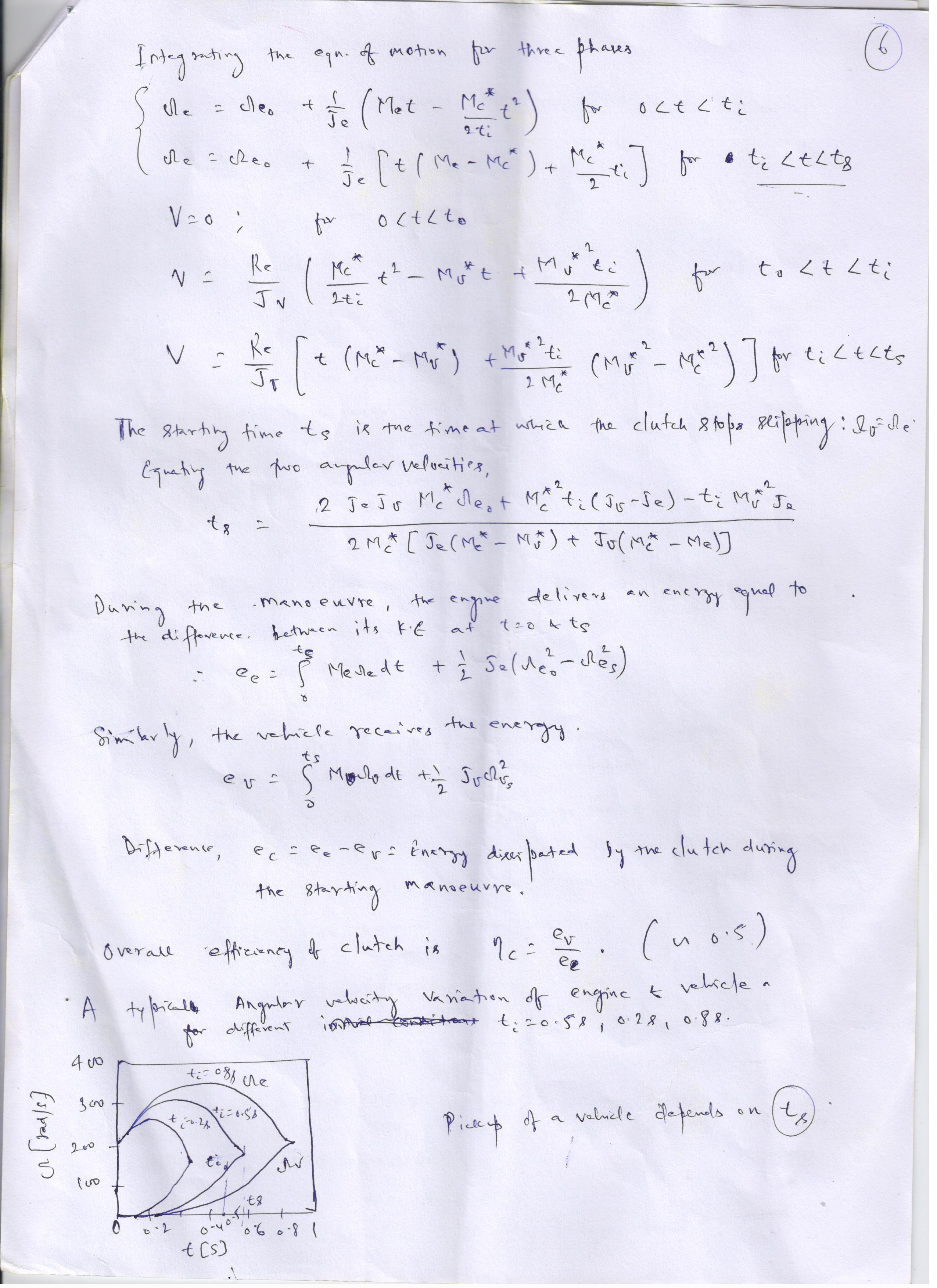
17. Vehicle Driving: Clutch Operation and its Efficiency (05/04/2016 ) Lecture 19.1 , Lecture 19.2 , Lecture 19.3 ,
{kind=link}
{kind=link}
{kind=link}
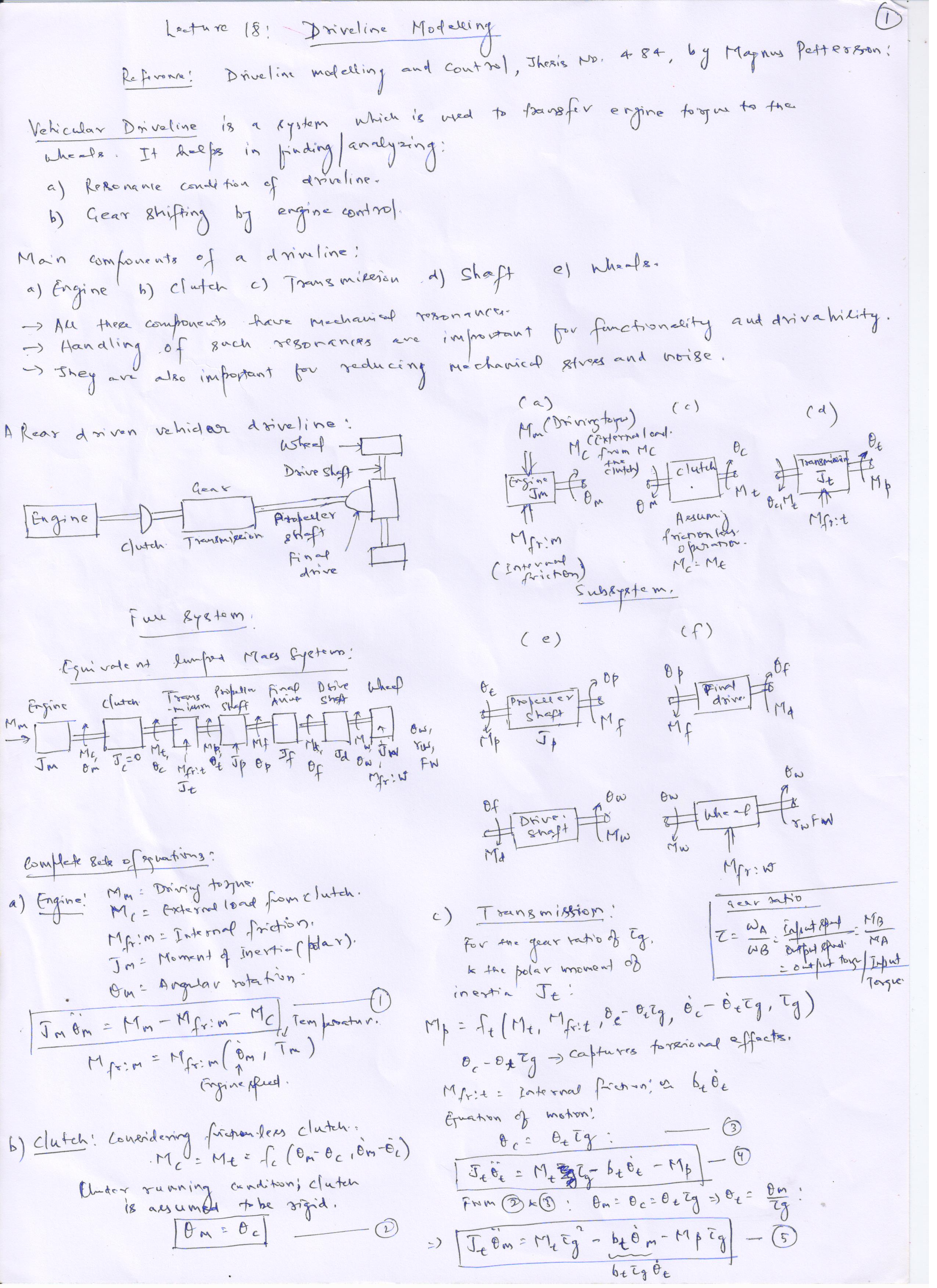
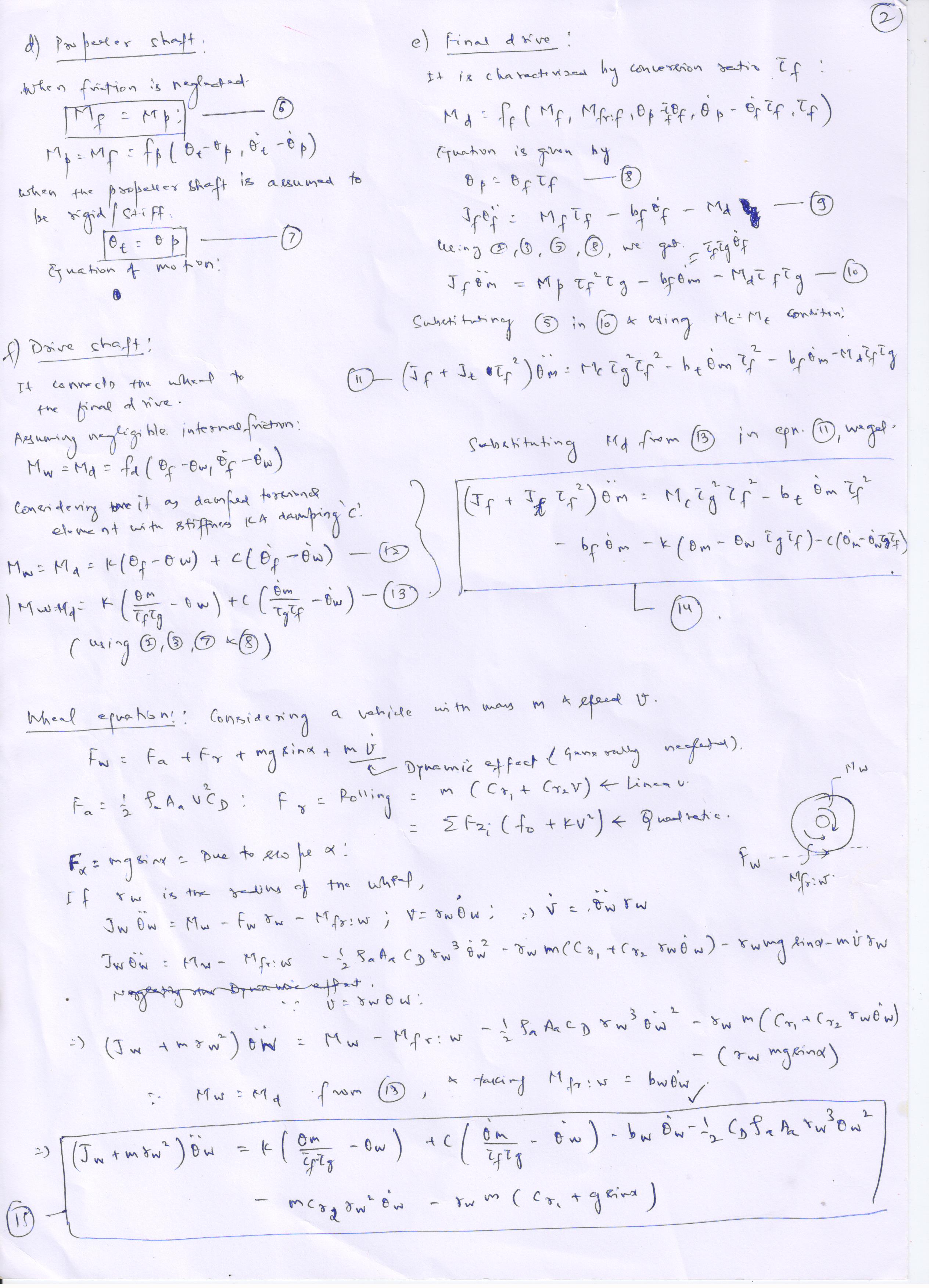
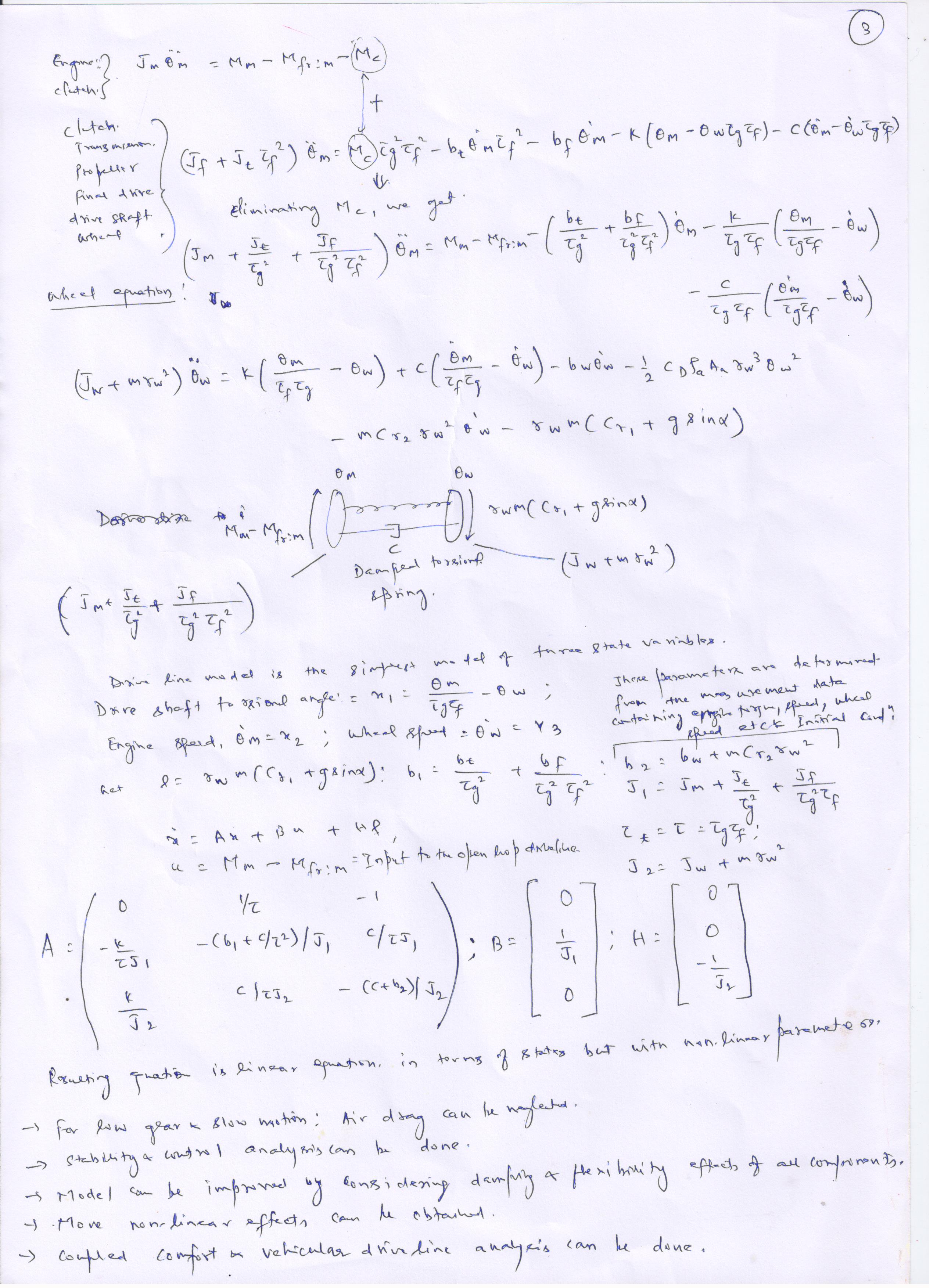
18. Vehicle Driveline Modeling (01/04/2016 ) Lecture 18.1 , Lecture 18.2 , Lecture 18.3 ,
{kind=link}
{kind=link}
{kind=link}
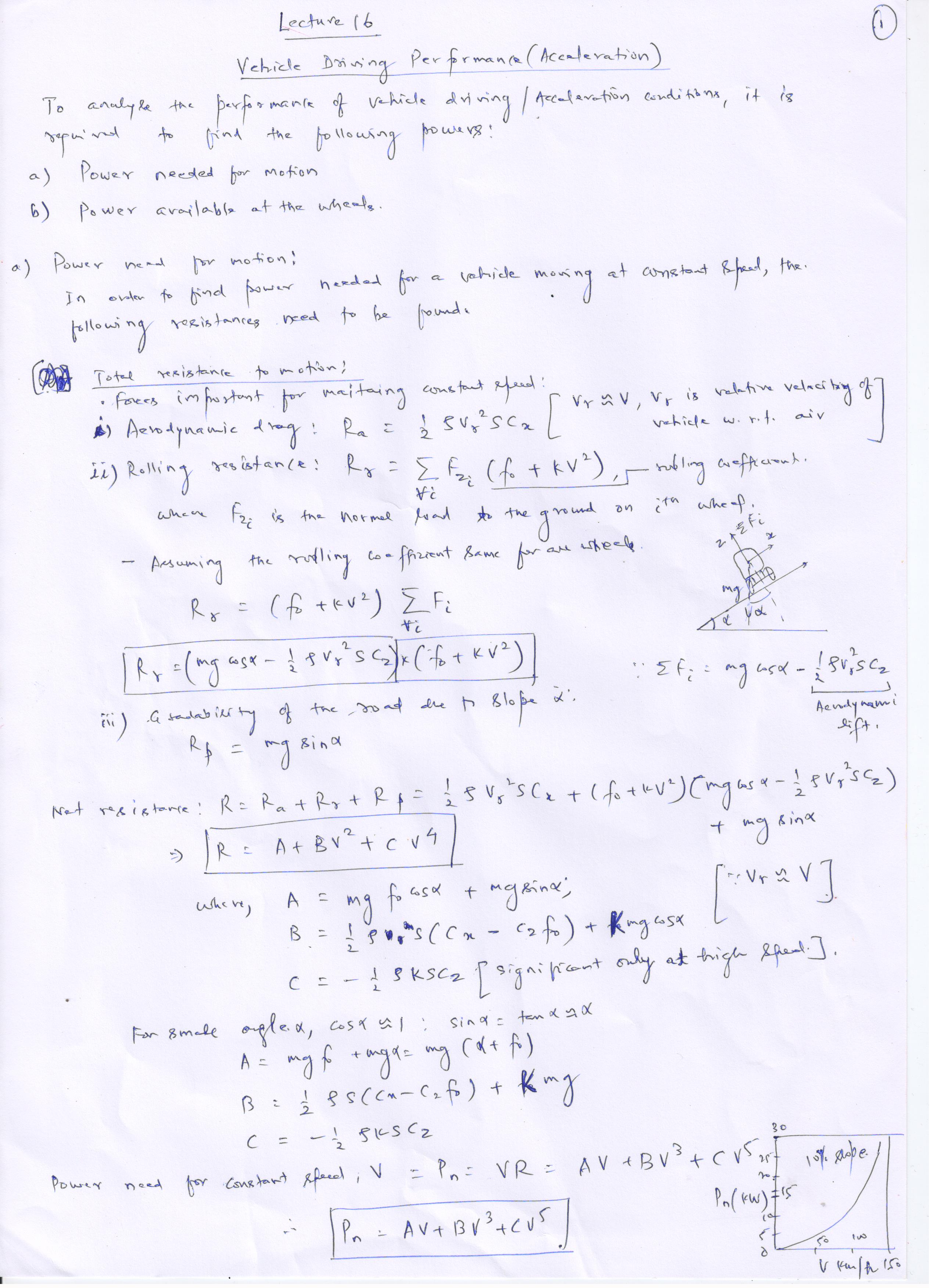
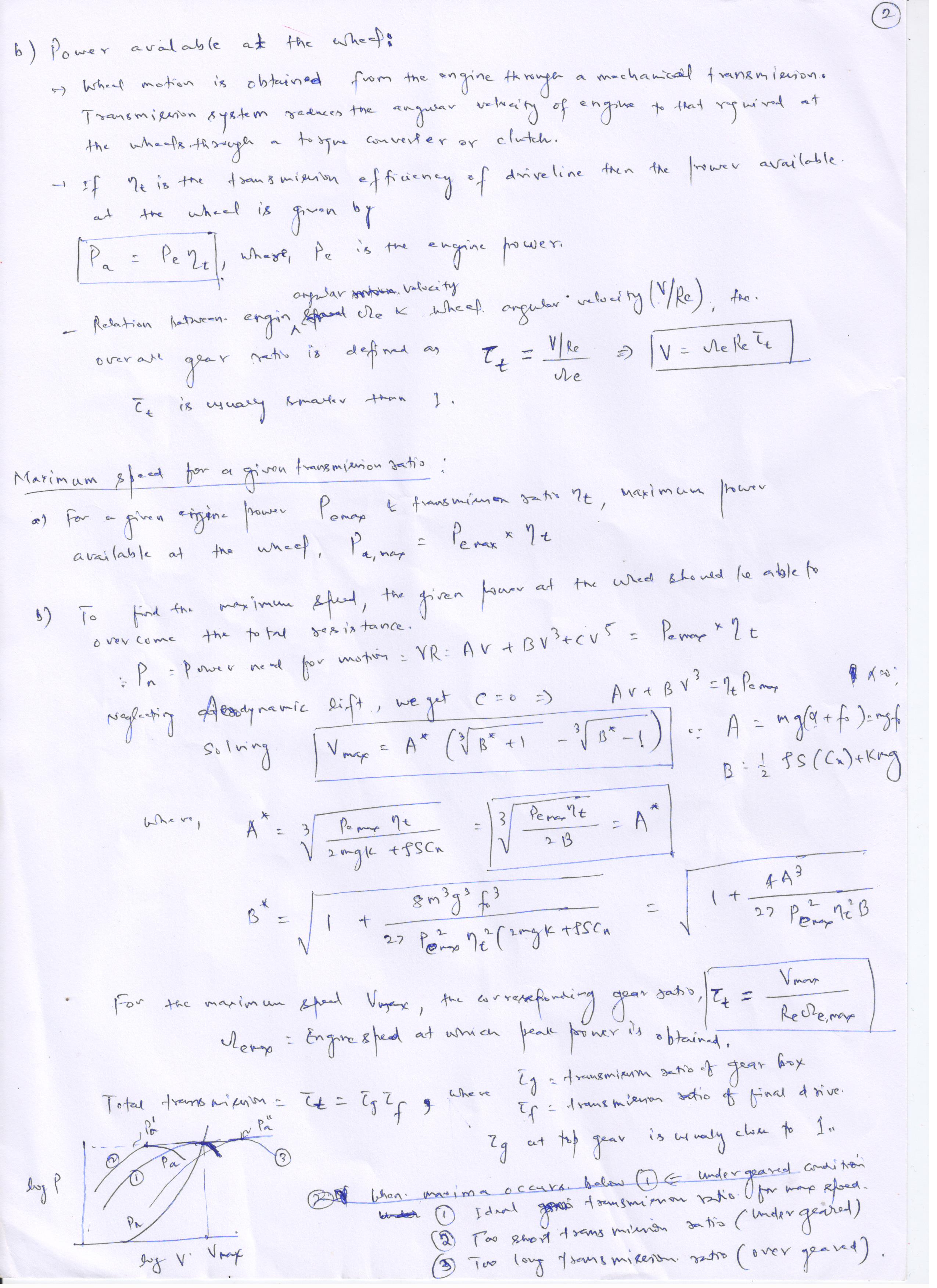
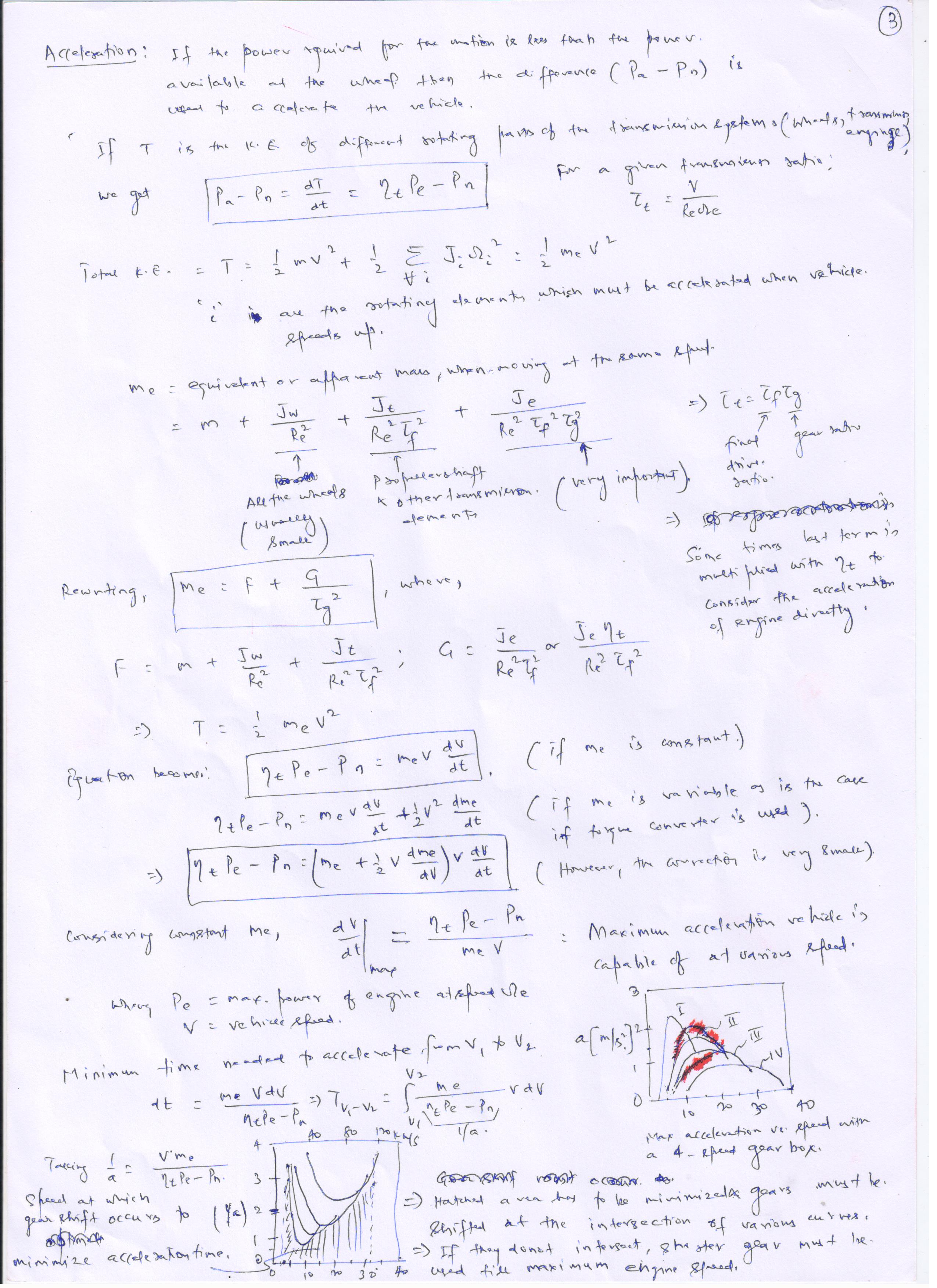
19. Vehicle Driving:Acceleration (31/03/2016 ) Lecture 17.1 , Lecture 17.2 , Lecture 17.3 ,
{kind=link}
{kind=link}
{kind=link}
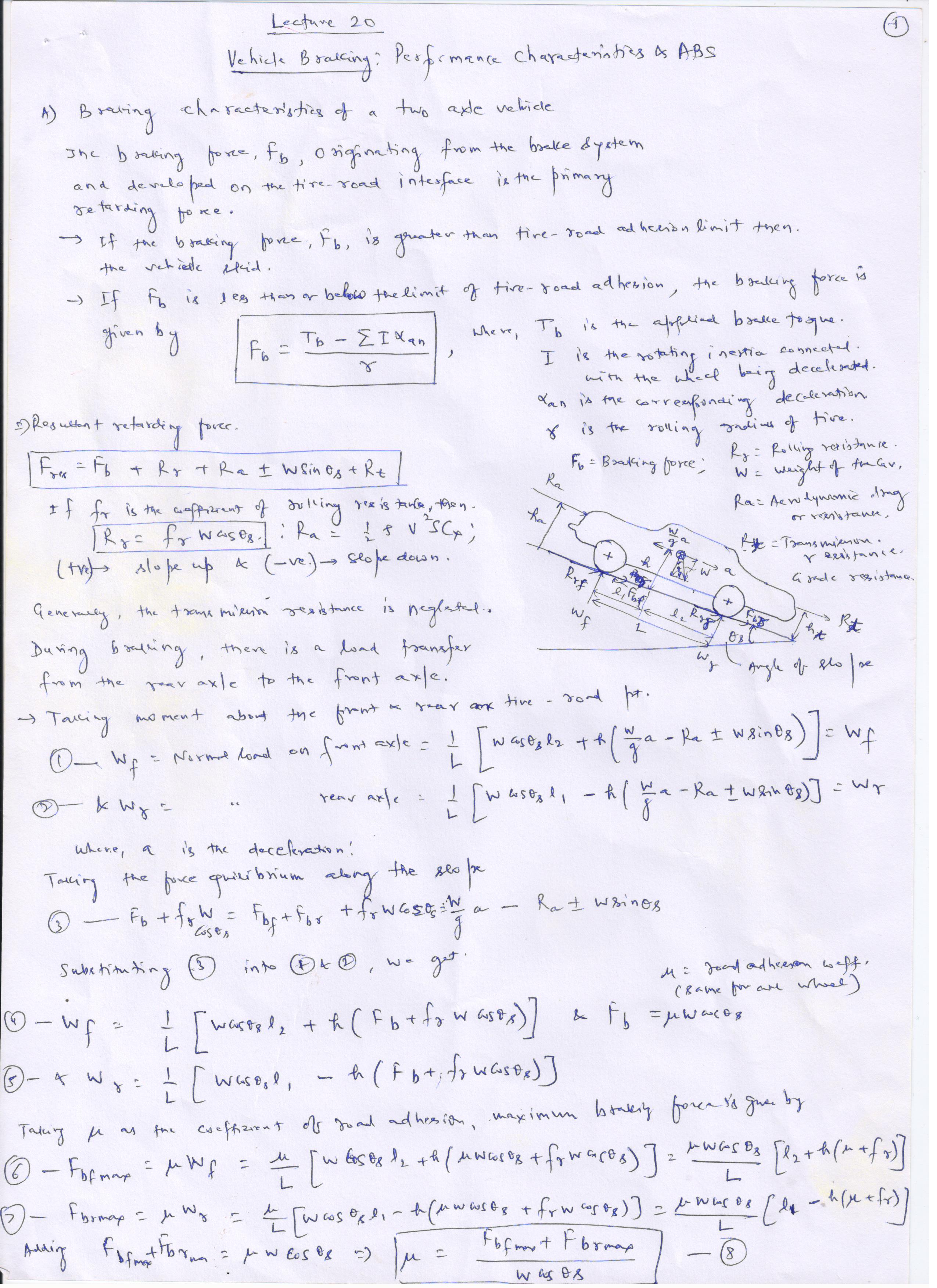
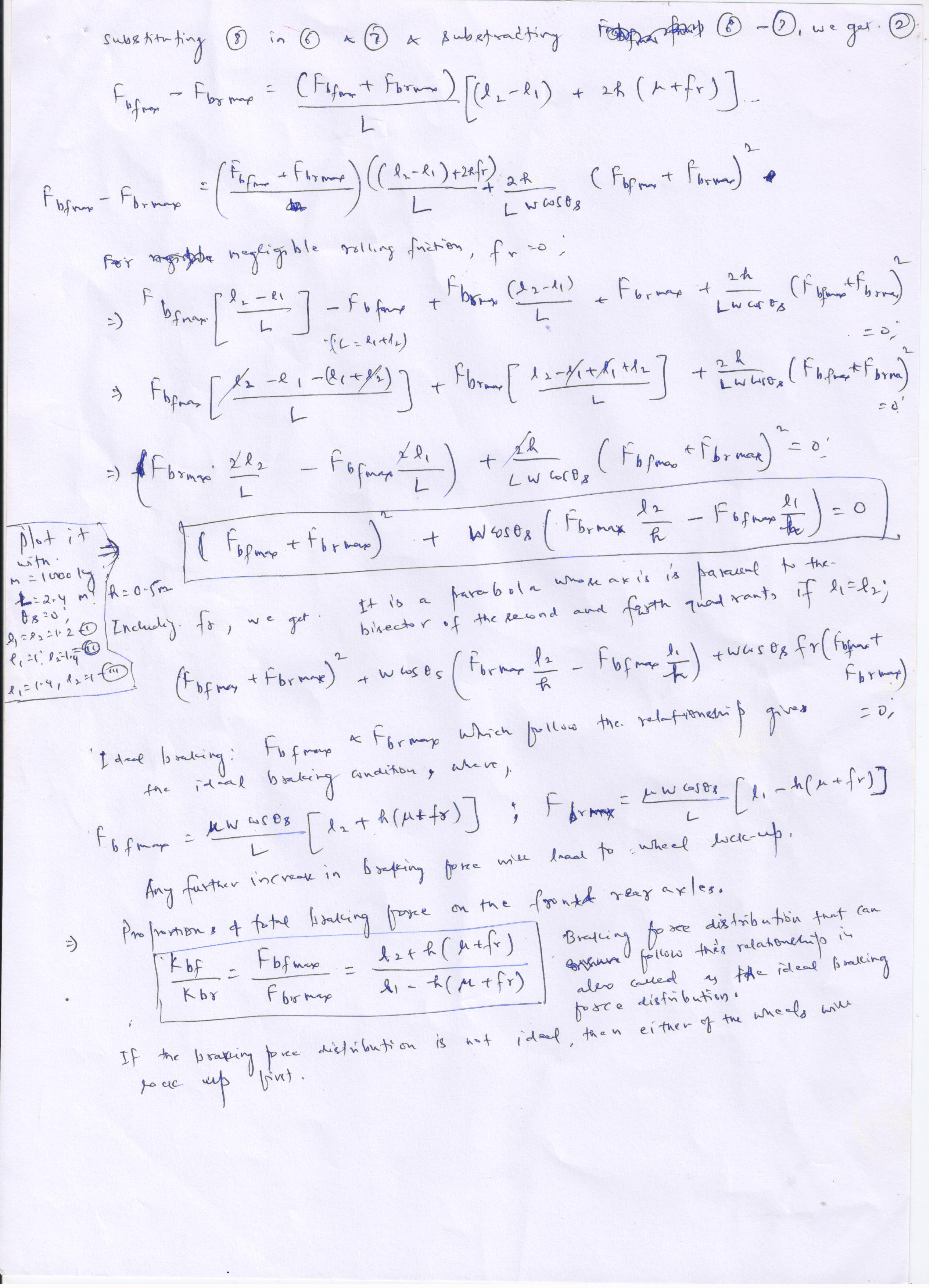
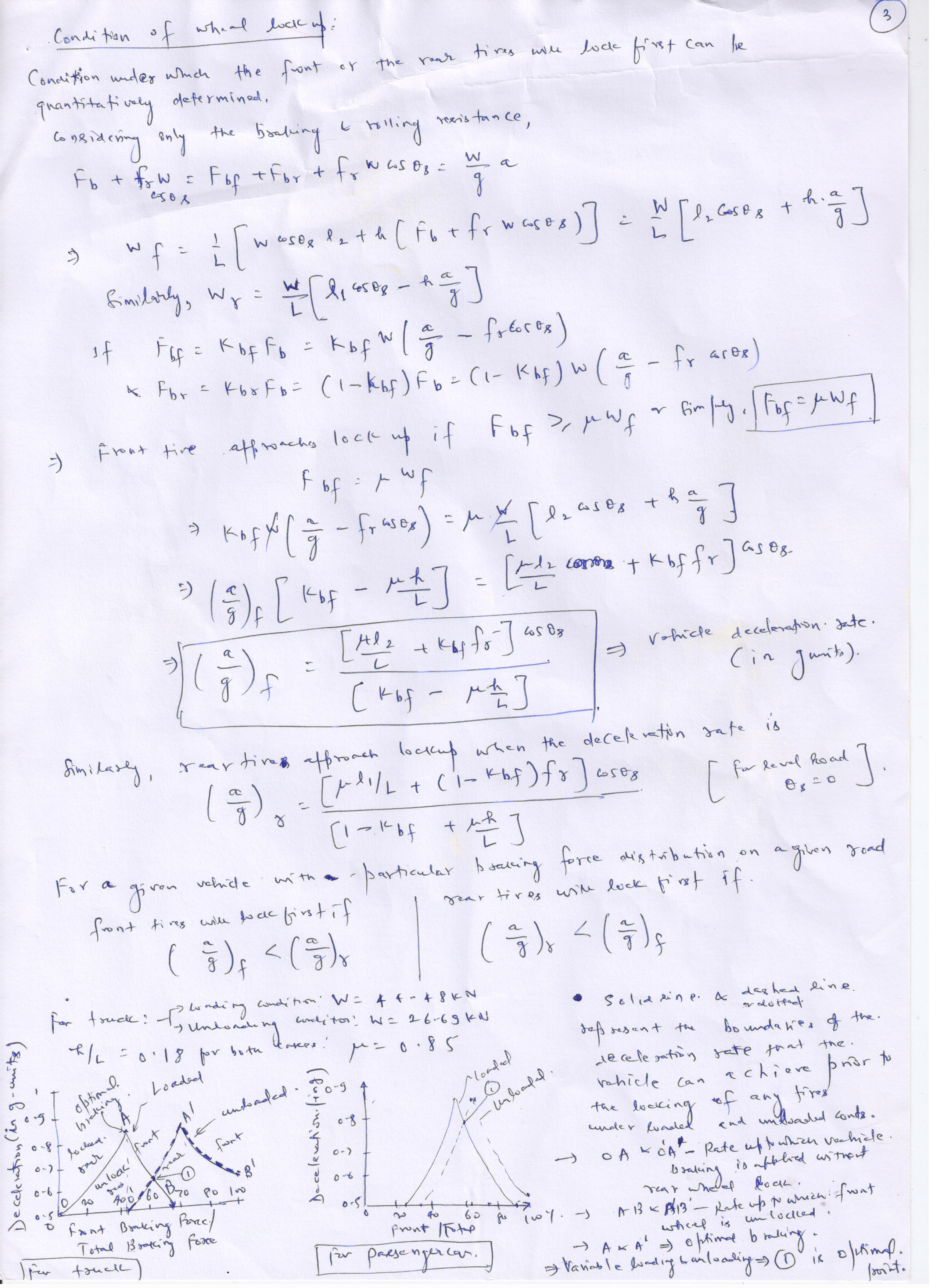
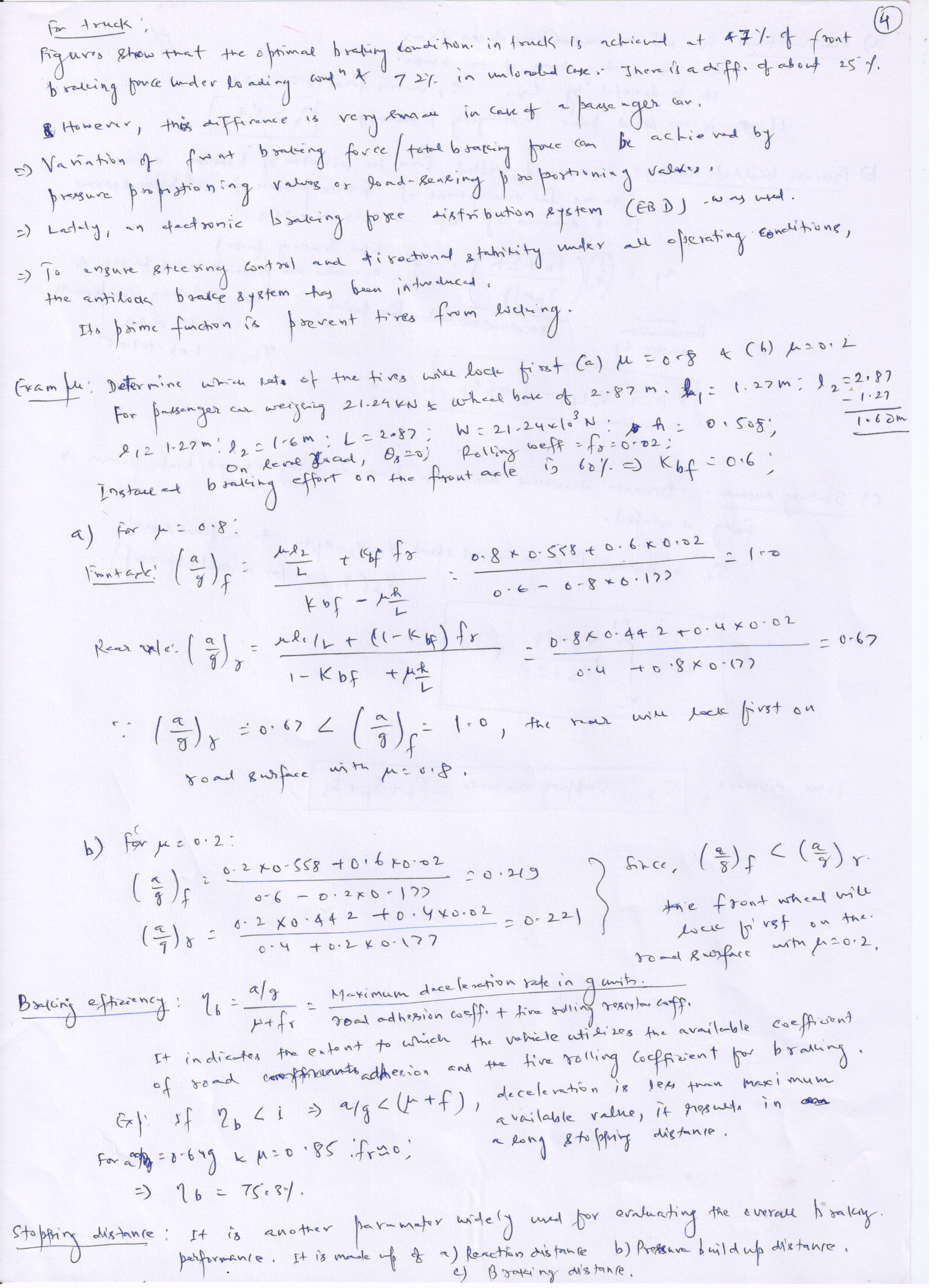
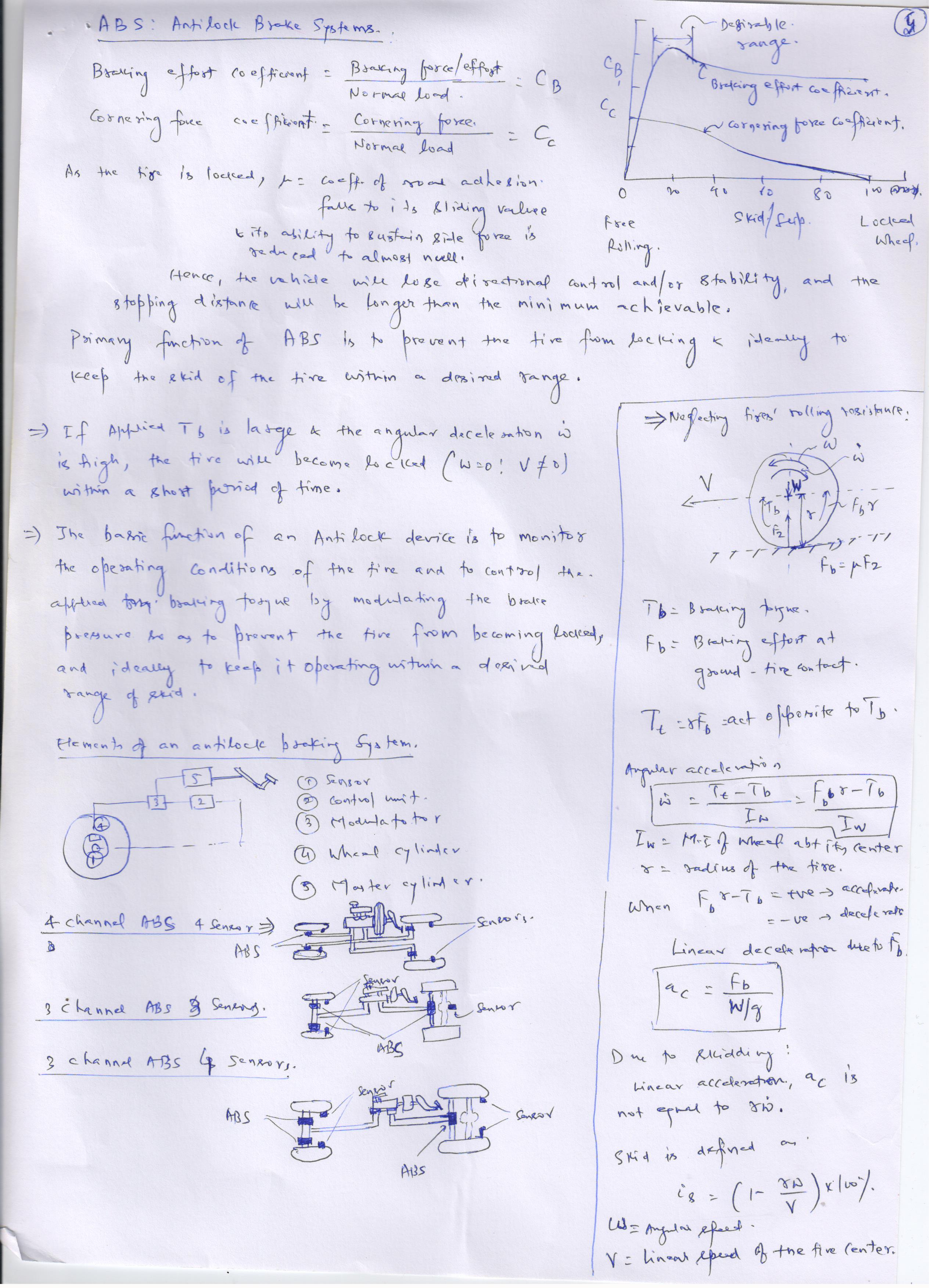
20. Vehicle Braking: Performance Characteristics & ABS System (12/04/2016 ) Lecture 20.1 , Lecture 20.2 , Lecture 20.3 , Lecture 20.4 , Lecture 20.5 ,
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
21. Vehicle Dynamics Project Presentation (Reference Papers are taken for academic class project from various sources).
Batch of 2020
(1) Group 1:Cornering motion of articulated vehicles , (2) Group 2:Dynamic Analysis of High Speed Railways ,
(3) Group 3:Drift control of cornering of a vehicle , (4) Group 4:Dynamic Analysis of Vehicle-Track model with and without disabled fasterner ,
(5) Group 5:Torque vectoring for Electrical vehicles , (6) Group 6:Vehicle Handling Analysis with Aerodynamic Interactions ,
(7) Group 7:Dynamic Modeling of Articulated Steering Wheel , (8) Group 8:DYNAMIC FRICTION MODEL ,
(9) Group 9:Transient analysis based on flexible brush model ,
Batch of 2019
(1) Group 1:BRAKING (ANTI-LOCK BRAKING SYSTEM AND REGENERATIVE BRAKING),
(2) Group 2:CONTROL STRATEGY OPTIMIZATION FOR A DUAL CLUTCH TRANSMISSION DOWNSHIFT,
(3) Group 3:Control System for Cornering in Heavy Vehicles, (4) Group 4:Analysis of a Vehicle Crash using Kelvin Model,
(5) Group 5:Analysis and Modeling of Motion Sickness, (6) Group 6:LATERAL DYNAMICS OF MULTI-ARTICULATED VEHICLES,
(7) Group 7:Active Suspension System, (8) Group 8:Autonomous Drift Cornering ,
(9) Group 9:Direct yaw moment controller Design, (10) Group 10:DYNAMIC FRICTION MODELS,
(11) Group 11:DYNAMIC ANALYSIS OF ARTICULATED WHEEL LOADER, (12) Group 12:DYNAMIC ANALYSIS OF RAILWAY VEHICLE,
(13) Group 13:Torque Vectoring,
Batch of 2018
(1) Group 1:Modelling & control of PHEV powertrain systems, (2) Group 2:MODELLING AND SIMULATION OF ELECTRIC ANDHYBRIDVEHICLES,
(3) Group 3:Integrated LTC-MPV Vehicle Dynamics Control, (4) Group 4:TIRE MODELLING FOR ANTI-LOCK BRAKING SYSTEM,
(5) Group 5:Numerical and Analytical model of Tire Forces and Moments, (6) Group 6:Combined bounce, pitch, and roll dynamics of vehicles,
Batch of 2017
(1) Group A:Vehicle-Driver Model, (2) Group B:Analysis of Vehicle-Suspension system, (3) Group C:Vehicle Cornering,
(4) Group D:Modeling and Analysis of Tire Models, (5) Group E:Dynamic Analysis of Transmission System,
(6) Group F:BRAKING SYSTEM IN DIFFERENT DRIVING CONDITIONS, (7) Group G:Cornering Analysis of Motorbike,
(8) Group H:DYNAMIC ANALYSIS OF RAILWAY VEHICLE-TRACK INTERACTIONS,
Batch of 2016
(1) Group A:Hunting stability analysis of railway systems, (2) Group B:Cornering of Vehicle ,
(3) Group C:DIRECTIONAL STABILITY OF ARTICULATED VEHICLE, (4) Group D: Stability Analysis of a Omni Directional Vehicle,
(5) Group E:Comfort analysis on vertical Rail Suspension, (6) Group F:Railway Suspension system Optimization,
(7) Group G:Tire Modeling and Analysis, (8) Group H:AUTOMATIC STEERING CONTROL,
(9) Group I:DRIVER MODEL, (10) Group J:Drive Train Simulation Multi Body Dynamics,
(11) Group K:Cornering of Vehicle (Based on Understeer Gradient Theory),
Batch of 2015
(1) Lateral Stability of Vehicle using CARSIM, (2) Driveline Modeling using Simulink and Carsim ,
(3)Anti-Braking System , (4) Operation of Twin Clutch System , (5) Steering Control using PID ,
(6) Road-Suspension Modeling , (7) Tire Modeling , (8) Driver Model , (9) Clutch Operation in Motorbike ,
Batch of 2014
(1) Driveline Model , (2) Driver Model , (3) Steering Model , (4) Suspension Model , (5) Motor Bike Simulation ,
(6) Driveline Model for Bike , (7) Tire Modeling , (8) Anti-Lock Braking System
Appendix
1. End-SEM Paper 2015, Solution to End-SEM Paper 2015
2. Mid-SEM Paper 2014, Solution to Mid-SEM Paper 2014
3. Mid-SEM Paper 2015, Solution to Mid-SEM 2015
ME5411: Design Core Lab (Introduction to MATLAB, MAPLE, and ANSYS)-(Aug-Nov -2010, 2011)
Introduction to Matlab, Maple and ANSYS and its application to Statics and Dynamic Analysis. - Variables, scripts, and operations, visualization and programming in Matlab, Maple, and ANSYS, solving equations- linear and nonlinear algebraic equations, systems of linear and nonlinear equations, differentiations/integration, differential equations-ordinary differential equations and partial differential equations, curve fitting. Advanced methods-probability and statistics, monte carlo simulations, simulinks. - Symbolic computation: Application of Maple and Matlab SYM - FEM Based computation: Application of Matlab and Ansys - Model problems related to solid mechanics and vibration.
ME5630: Nonlinear Oscillations-(Jan-April 2011, 2012, 2013)
A brief review of linear systems: solution methodology, phase space and stability analysis. - Different types of nonlinear systems and its classification based on the nature of nonlinearity. Nonlinear systems: Modeling of single/multi-degree of freedom dynamical systems with single/multiple inputs, evolution equations obtained from continuous systems, existence of nonlinear resonances (primary/ secondary/ internal/ combination/ sub-combination). - Asymptotic techniques: Regular perturbation (straight forward expansion, Harmonic balance), singular perturbation methods (Lindstedt-Poincare, Averaging), multiple scales (Ordinary and partial differential equations), - Equilibrium stability vs orbital stability of periodic (ultrasubharmonic) and quasiperiodic systems, Introduction to local bifurcation theory (divergence (saddlenode/ pitch fork)) and flutter (Hopf),Numerical techniques (integration, sampling (Poincares maps/spectral), bifurcation). - Applications include external/parametric excitation of resonant engineering systems, self-excited oscillatory systems, boundary/field excitation of continuous large scale, micro and nano systems (String/rod/beam, buckling/whirling) - A brief introduction to Chaos.
Tutorials on Duffing Oscillator
ME6100: Advanced Topics in Mathematical Methods(Jan-April 2011) (with Dr. Prasanth Kumar)
Artificial Neural Network and Genetic Algorithm Introduction to linear and nonlinear dynamical system, fixed points and stability, phase plane analysis, Limit cycles, Bifurcations in 1D and 2D of systems, Lyapunov stability. Probability theory: Sample space, Probability, random number and variable, distribution functions, Bayes theorem. Vector space and subspace, Basis, Dimensions, Orthonormal basis, Orthonormal decomposition, Single Value Decomposition, Proper Orthogonal Decomposition, and Krylov Subspace Fourier Integrals and transform, Properties of Fourier transforms, The Fast Fourier Transform, Problems associated with FFT, The Continuous wavelet transform, Orthogonality and Scaler products, Multiresolutions, Fast Wavelet Transform.
ME5130: Finite Element Analysis (Aug-Nov 2011, Aug-Dec'21)
Mathematical Preliminaries, Integral Formulations and Variation Method. Linear finite element procedures in one and two dimensional problems in solid mechanics. Convergence, interpolation functions, isoperimetric mapping, numerical integration and modeling consideration. Application of FEM to single variable two dimensional problems governed by Poisson’s equation. Weighted residual methods - Galerkin approximation. Introduction to constraint equations by Lagrange multipliers and penalty method. Solution of linear algebraic equations. FEM programming.
ME6106: Seminar (Aug-Nov 2012)
Technical and general presentation, Group Discussion, Interview and introductions, Technical writing.
Last updated on July, 2021